

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5.2 Verhaltensauswahl 107<br />
Rückmeldung<br />
deliberative<br />
Ebene<br />
Planungsschritt<br />
Zerlegung des<br />
Planungsschrittes<br />
in eine Sequenz<br />
Durchlaufen<br />
der Sequenz<br />
Koordinierung<br />
aktiver Verhalten<br />
pro Zustand<br />
Verhalten 1<br />
Verhalten 2<br />
vermittelnde<br />
Ebene<br />
Planungsschritte<br />
(FSA)<br />
Datenbank<br />
Verhaltens−<br />
Datenbank<br />
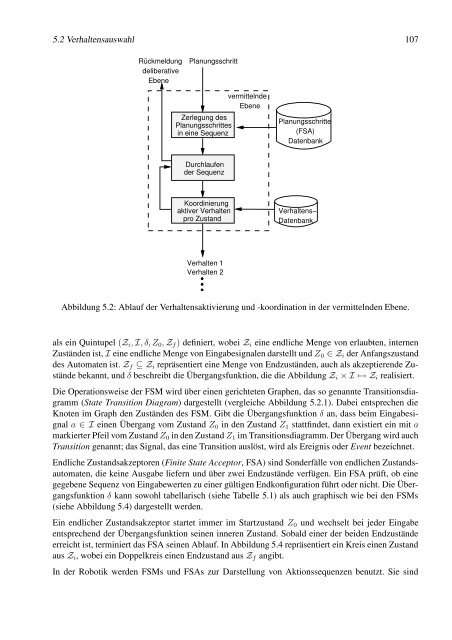
Abbildung 5.2: Ablauf der Verhaltensaktivierung und -koordination in der vermittelnden Ebene.<br />
als ein Quintupel (Zi, I, δ, Z0, Zf) definiert, wobei Zi eine endliche Menge von erlaubten, internen<br />
Zuständen ist, I eine endliche Menge von Eingabesignalen darstellt und Z0 ∈ Zi der Anfangszustand<br />
des Automaten ist. Zf ⊆ Zi repräsentiert eine Menge von Endzuständen, auch als akzeptierende Zustände<br />
bekannt, und δ beschreibt die Übergangsfunktion, die die Abbildung Zi × I ↦→ Zi realisiert.<br />
Die Operationsweise der FSM wird über einen gerichteten Graphen, das so genannte Transitionsdiagramm<br />
(State Transition Diagram) dargestellt (vergleiche Abbildung 5.2.1). Dabei entsprechen die<br />
Knoten im Graph den Zuständen des FSM. Gibt die Übergangsfunktion δ an, dass beim Eingabesignal<br />
a ∈ I einen Übergang vom Zustand Z0 in den Zustand Z1 stattfindet, dann existiert ein mit a<br />
markierter Pfeil vom Zustand Z0 in den Zustand Z1 im Transitionsdiagramm. Der Übergang wird auch<br />
Transition genannt; das Signal, das eine Transition auslöst, wird als Ereignis oder Event bezeichnet.<br />
Endliche Zustandsakzeptoren (Finite State Acceptor, FSA) sind Sonderfälle von endlichen Zustandsautomaten,<br />
die keine Ausgabe liefern und über zwei Endzustände verfügen. Ein FSA prüft, ob eine<br />
gegebene Sequenz von Eingabewerten zu einer gültigen Endkonfiguration führt oder nicht. Die Übergangsfunktion<br />
δ kann sowohl tabellarisch (siehe Tabelle 5.1) als auch graphisch wie bei den FSMs<br />
(siehe Abbildung 5.4) dargestellt werden.<br />
Ein endlicher Zustandsakzeptor startet immer im Startzustand Z0 und wechselt bei jeder Eingabe<br />
entsprechend der Übergangsfunktion seinen inneren Zustand. Sobald einer der beiden Endzustände<br />
erreicht ist, terminiert das FSA seinen Ablauf. In Abbildung 5.4 repräsentiert ein Kreis einen Zustand<br />
aus Zi, wobei ein Doppelkreis einen Endzustand aus Zf angibt.<br />
In der Robotik werden FSMs und FSAs zur Darstellung von Aktionssequenzen benutzt. Sie sind














