

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.2 Hindernisvermeidung 85<br />
PSfrag replacements<br />
C 1<br />
B B<br />
1<br />
2<br />
K1 K2<br />
M K1<br />
M<br />
K2<br />
U<br />
U<br />
ɛ<br />
K2 U<br />
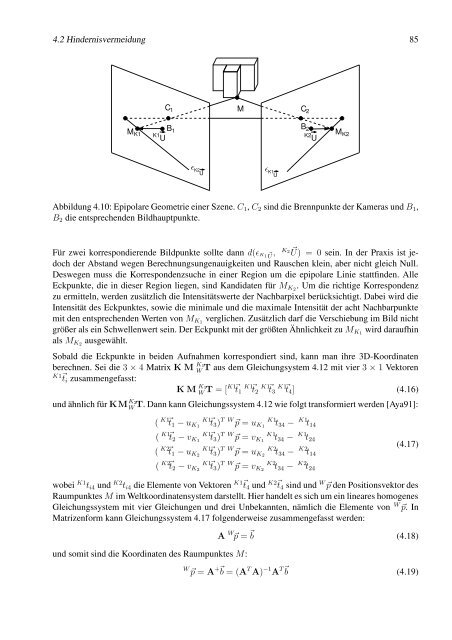
Abbildung 4.10: Epipolare Geometrie einer Szene. C1, C2 sind die Brennpunkte der Kameras und B1,<br />
B2 die entsprechenden Bildhauptpunkte.<br />
Für zwei korrespondierende Bildpunkte sollte dann d(ɛK 1 � U , K2 � U) = 0 sein. In der Praxis ist jedoch<br />
der Abstand wegen Berechnungsungenauigkeiten und Rauschen klein, aber nicht gleich Null.<br />
Deswegen muss die Korrespondenzsuche in einer Region um die epipolare Linie stattfinden. Alle<br />
Eckpunkte, die in dieser Region liegen, sind Kandidaten für MK2. Um die richtige Korrespondenz<br />
zu ermitteln, werden zusätzlich die Intensitätswerte der Nachbarpixel berücksichtigt. Dabei wird die<br />
Intensität des Eckpunktes, sowie die minimale und die maximale Intensität der acht Nachbarpunkte<br />
mit den entsprechenden Werten von MK1 verglichen. Zusätzlich darf die Verschiebung im Bild nicht<br />
größer als ein Schwellenwert sein. Der Eckpunkt mit der größten Ähnlichkeit zu MK1 wird daraufhin<br />
als MK2 ausgewählt.<br />
Sobald die Eckpunkte in beiden Aufnahmen korrespondiert sind, kann man ihre 3D-Koordinaten<br />
berechnen. Sei die 3 × 4 Matrix K M K1<br />
W T aus dem Gleichungsystem 4.12 mit vier 3 × 1 Vektoren<br />
K1�ti zusammengefasst:<br />
K M K1<br />
W T = [K1�t1 K1�t2 K1�t3 K1�t4] (4.16)<br />
und ähnlich für KM K2<br />
W T. Dann kann Gleichungssystem 4.12 wie folgt transformiert werden [Aya91]:<br />
( K1�t1 −<br />
K1�t3) uK1<br />
T W K1<br />
�p = uK1 t34 − K1 t14<br />
( K1�t2 −<br />
K1�t3) vK1<br />
T W K1<br />
�p = vK1 t34 − K1 t24<br />
( K2�t1 −<br />
K1�t3) uK2<br />
T W K2<br />
�p = uK2 t34 − K2 t14<br />
( K2�t2 −<br />
K1�t3) vK2<br />
T W K2<br />
�p = vK2 t34 − K2 (4.17)<br />
t24<br />
wobei K1 ti4 und K2 ti4 die Elemente von Vektoren K1�t4 und K2�t4 sind und W �p den Positionsvektor des<br />
Raumpunktes M im Weltkoordinatensystem darstellt. Hier handelt es sich um ein lineares homogenes<br />
Gleichungssystem mit vier Gleichungen und drei Unbekannten, nämlich die Elemente von W �p. In<br />
Matrizenform kann Gleichungssystem 4.17 folgenderweise zusammengefasst werden:<br />
und somit sind die Koordinaten des Raumpunktes M:<br />
M<br />
ɛ<br />
K1 U<br />
C2<br />
A W �p = � b (4.18)<br />
W �p = A +� b = (A T A) −1 A T� b (4.19)














