

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
16 2.2 Reaktive Verhalten für Manipulatoren<br />
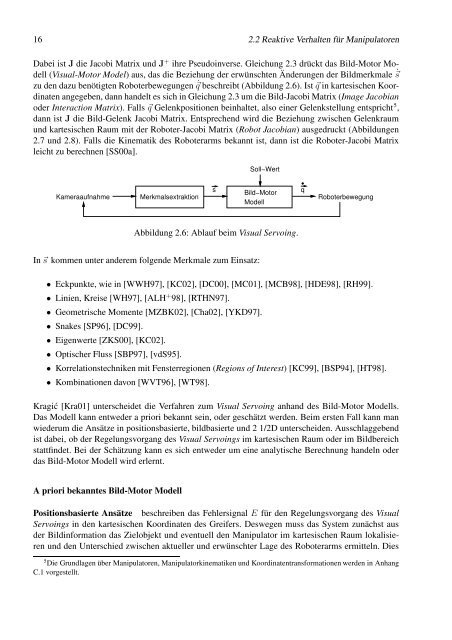
Dabei ist J die Jacobi Matrix und J + ihre Pseudoinverse. Gleichung 2.3 drückt das Bild-Motor Modell<br />
(Visual-Motor Model) aus, das die Beziehung der erwünschten Änderungen der Bildmerkmale ˙ �s<br />
zu den dazu benötigten Roboterbewegungen ˙ �q beschreibt (Abbildung 2.6). Ist �q in kartesischen Koordinaten<br />
angegeben, dann handelt es sich in Gleichung 2.3 um die Bild-Jacobi Matrix (Image Jacobian<br />
oder Interaction Matrix). Falls �q Gelenkpositionen beinhaltet, also einer Gelenkstellung entspricht 5 ,<br />
dann ist J die Bild-Gelenk Jacobi Matrix. Entsprechend wird die Beziehung zwischen Gelenkraum<br />
und kartesischen Raum mit der Roboter-Jacobi Matrix (Robot Jacobian) ausgedruckt (Abbildungen<br />
2.7 und 2.8). Falls die Kinematik des Roboterarms bekannt ist, dann ist die Roboter-Jacobi Matrix<br />
leicht zu berechnen [SS00a].<br />
Soll−Wert<br />
s<br />
Bild−Motor<br />
q<br />
Kameraaufnahme Merkmalsextraktion<br />
Roboterbewegung<br />
Modell<br />
Abbildung 2.6: Ablauf beim Visual Servoing.<br />
In �s kommen unter anderem folgende Merkmale zum Einsatz:<br />
• Eckpunkte, wie in [WWH97], [KC02], [DC00], [MC01], [MCB98], [HDE98], [RH99].<br />
• Linien, Kreise [WH97], [ALH + 98], [RTHN97].<br />
• Geometrische Momente [MZBK02], [Cha02], [YKD97].<br />
• Snakes [SP96], [DC99].<br />
• Eigenwerte [ZKS00], [KC02].<br />
• Optischer Fluss [SBP97], [vdS95].<br />
• Korrelationstechniken mit Fensterregionen (Regions of Interest) [KC99], [BSP94], [HT98].<br />
• Kombinationen davon [WVT96], [WT98].<br />
Kragić [Kra01] unterscheidet die Verfahren zum Visual Servoing anhand des Bild-Motor Modells.<br />
Das Modell kann entweder a priori bekannt sein, oder geschätzt werden. Beim ersten Fall kann man<br />
wiederum die Ansätze in positionsbasierte, bildbasierte und 2 1/2D unterscheiden. Ausschlaggebend<br />
ist dabei, ob der Regelungsvorgang des Visual Servoings im kartesischen Raum oder im Bildbereich<br />
stattfindet. Bei der Schätzung kann es sich entweder um eine analytische Berechnung handeln oder<br />
das Bild-Motor Modell wird erlernt.<br />
A priori bekanntes Bild-Motor Modell<br />
Positionsbasierte Ansätze beschreiben das Fehlersignal E für den Regelungsvorgang des Visual<br />
Servoings in den kartesischen Koordinaten des Greifers. Deswegen muss das System zunächst aus<br />
der Bildinformation das Zielobjekt und eventuell den Manipulator im kartesischen Raum lokalisieren<br />
und den Unterschied zwischen aktueller und erwünschter Lage des Roboterarms ermitteln. Dies<br />
5 Die Grundlagen über Manipulatoren, Manipulatorkinematiken und Koordinatentransformationen werden in Anhang<br />
C.1 vorgestellt.














