

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.5 Virtuelle Realität und Robotik 41<br />
Start<br />
(a)<br />
Ziel<br />
(−)<br />
FO2<br />
FO1<br />
O1<br />
(−)<br />
F O2<br />
F Ziel<br />
F<br />
O3<br />
FZiel FO1<br />
F<br />
O3<br />
F O2<br />
FO3 F<br />
O2<br />
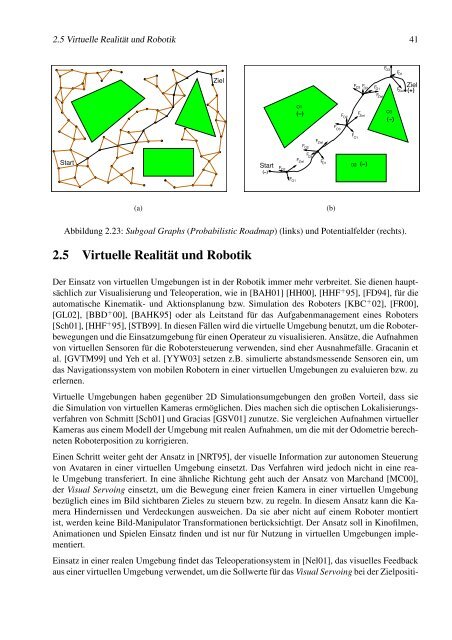
Abbildung 2.23: Subgoal Graphs (Probabilistic Roadmap) (links) und Potentialfelder (rechts).<br />
2.5 Virtuelle Realität und Robotik<br />
Der Einsatz von virtuellen Umgebungen ist in der Robotik immer mehr verbreitet. Sie dienen hauptsächlich<br />
zur Visualisierung und Teleoperation, wie in [BAH01] [HH00], [HHF + 95], [FD94], für die<br />
automatische Kinematik- und Aktionsplanung bzw. Simulation des Roboters [KBC + 02], [FR00],<br />
[GL02], [BBD + 00], [BAHK95] oder als Leitstand für das Aufgabenmanagement eines Roboters<br />
[Sch01], [HHF + 95], [STB99]. In diesen Fällen wird die virtuelle Umgebung benutzt, um die Roboterbewegungen<br />
und die Einsatzumgebung für einen Operateur zu visualisieren. Ansätze, die Aufnahmen<br />
von virtuellen Sensoren für die Robotersteuerung verwenden, sind eher Ausnahmefälle. Gracanin et<br />
al. [GVTM99] und Yeh et al. [YYW03] setzen z.B. simulierte abstandsmessende Sensoren ein, um<br />
das Navigationssystem von mobilen Robotern in einer virtuellen Umgebungen zu evaluieren bzw. zu<br />
erlernen.<br />
Virtuelle Umgebungen haben gegenüber 2D Simulationsumgebungen den großen Vorteil, dass sie<br />
die Simulation von virtuellen Kameras ermöglichen. Dies machen sich die optischen Lokalisierungsverfahren<br />
von Schmitt [Sch01] und Gracias [GSV01] zunutze. Sie vergleichen Aufnahmen virtueller<br />
Kameras aus einem Modell der Umgebung mit realen Aufnahmen, um die mit der Odometrie berechneten<br />
Roboterposition zu korrigieren.<br />
Einen Schritt weiter geht der Ansatz in [NRT95], der visuelle Information zur autonomen Steuerung<br />
von Avataren in einer virtuellen Umgebung einsetzt. Das Verfahren wird jedoch nicht in eine reale<br />
Umgebung transferiert. In eine ähnliche Richtung geht auch der Ansatz von Marchand [MC00],<br />
der Visual Servoing einsetzt, um die Bewegung einer freien Kamera in einer virtuellen Umgebung<br />
bezüglich eines im Bild sichtbaren Zieles zu steuern bzw. zu regeln. In diesem Ansatz kann die Kamera<br />
Hindernissen und Verdeckungen ausweichen. Da sie aber nicht auf einem Roboter montiert<br />
ist, werden keine Bild-Manipulator Transformationen berücksichtigt. Der Ansatz soll in Kinofilmen,<br />
Animationen und Spielen Einsatz finden und ist nur für Nutzung in virtuellen Umgebungen implementiert.<br />
Einsatz in einer realen Umgebung findet das Teleoperationsystem in [Nel01], das visuelles Feedback<br />
aus einer virtuellen Umgebung verwendet, um die Sollwerte für das Visual Servoing bei der Zielpositi-<br />
Start<br />
(b)<br />
F<br />
O1<br />
O2<br />
F<br />
Ziel<br />
(−)<br />
F O1<br />
FZiel<br />
F O3<br />
O3<br />
(−)<br />
FO1<br />
F Ziel<br />
Ziel<br />
(+)














