

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6 1.2 Mobile Manipulation mit Hindernisvermeidung<br />
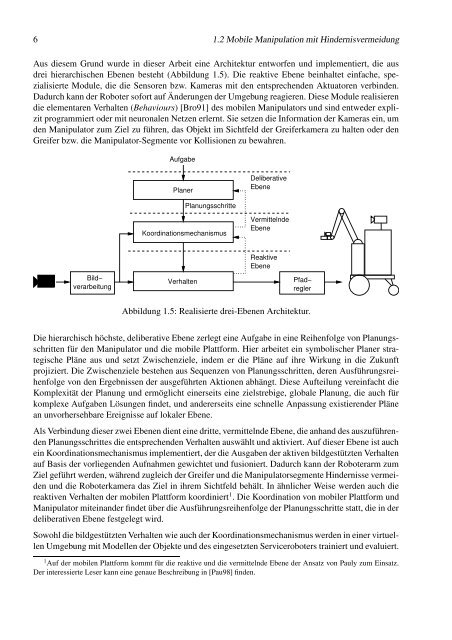
Aus diesem Grund wurde in dieser Arbeit eine Architektur entworfen und implementiert, die aus<br />
drei hierarchischen Ebenen besteht (Abbildung 1.5). Die reaktive Ebene beinhaltet einfache, spezialisierte<br />
Module, die die Sensoren bzw. Kameras mit den entsprechenden Aktuatoren verbinden.<br />
Dadurch kann der Roboter sofort auf Änderungen der Umgebung reagieren. Diese Module realisieren<br />
die elementaren Verhalten (Behaviours) [Bro91] des mobilen Manipulators und sind entweder explizit<br />
programmiert oder mit neuronalen Netzen erlernt. Sie setzen die Information der Kameras ein, um<br />
den Manipulator zum Ziel zu führen, das Objekt im Sichtfeld der Greiferkamera zu halten oder den<br />
Greifer bzw. die Manipulator-Segmente vor Kollisionen zu bewahren.<br />
Bild−<br />
verarbeitung<br />
Aufgabe<br />
Planer<br />
Planungsschritte<br />
Koordinationsmechanismus<br />
Verhalten<br />
Deliberative<br />
Ebene<br />
Vermittelnde<br />
Ebene<br />
Reaktive<br />
Ebene<br />
Pfad−<br />
regler<br />
Abbildung 1.5: Realisierte drei-Ebenen Architektur.<br />
Die hierarchisch höchste, deliberative Ebene zerlegt eine Aufgabe in eine Reihenfolge von Planungsschritten<br />
für den Manipulator und die mobile Plattform. Hier arbeitet ein symbolischer Planer strategische<br />
Pläne aus und setzt Zwischenziele, indem er die Pläne auf ihre Wirkung in die Zukunft<br />
projiziert. Die Zwischenziele bestehen aus Sequenzen von Planungsschritten, deren Ausführungsreihenfolge<br />
von den Ergebnissen der ausgeführten Aktionen abhängt. Diese Aufteilung vereinfacht die<br />
Komplexität der Planung und ermöglicht einerseits eine zielstrebige, globale Planung, die auch für<br />
komplexe Aufgaben Lösungen findet, und andererseits eine schnelle Anpassung existierender Pläne<br />
an unvorhersehbare Ereignisse auf lokaler Ebene.<br />
Als Verbindung dieser zwei Ebenen dient eine dritte, vermittelnde Ebene, die anhand des auszuführenden<br />
Planungsschrittes die entsprechenden Verhalten auswählt und aktiviert. Auf dieser Ebene ist auch<br />
ein Koordinationsmechanismus implementiert, der die Ausgaben der aktiven bildgestützten Verhalten<br />
auf Basis der vorliegenden Aufnahmen gewichtet und fusioniert. Dadurch kann der Roboterarm zum<br />
Ziel geführt werden, während zugleich der Greifer und die Manipulatorsegmente Hindernisse vermeiden<br />
und die Roboterkamera das Ziel in ihrem Sichtfeld behält. In ähnlicher Weise werden auch die<br />
reaktiven Verhalten der mobilen Plattform koordiniert 1 . Die Koordination von mobiler Plattform und<br />
Manipulator miteinander findet über die Ausführungsreihenfolge der Planungsschritte statt, die in der<br />
deliberativen Ebene festgelegt wird.<br />
Sowohl die bildgestützten Verhalten wie auch der Koordinationsmechanismus werden in einer virtuellen<br />
Umgebung mit Modellen der Objekte und des eingesetzten Serviceroboters trainiert und evaluiert.<br />
1 Auf der mobilen Plattform kommt für die reaktive und die vermittelnde Ebene der Ansatz von Pauly zum Einsatz.<br />
Der interessierte Leser kann eine genaue Beschreibung in [Pau98] finden.














