

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5.6 Ergebnisse der Verhaltenskoordination 123<br />
5.6 Ergebnisse der Verhaltenskoordination<br />
Im Folgenden werden zwei Greifbewegungen, jeweils eine in der virtuellen Umgebung und eine mit<br />
dem realen Roboter, dokumentiert und die Bilder der Kameras zu mehreren Zeitpunkten dargestellt.<br />
Die Verhaltenskoordinierung ist mit einer Taktfrequenz von 1 Hz ausgeführt. Die auszuführende Aufgabe<br />
ist in beiden Fällen der Planungsschritt Erreiche_Objekt. Während des Greifvorgangs sind<br />
vier Verhalten aktiv: die Zielführung, das Planungsverhalten, die Hindernisvermeidung des Greifers<br />
und das Zielfolgen, das das Zielobjekt im Zentrum der Greiferkamera halten soll 13 .<br />
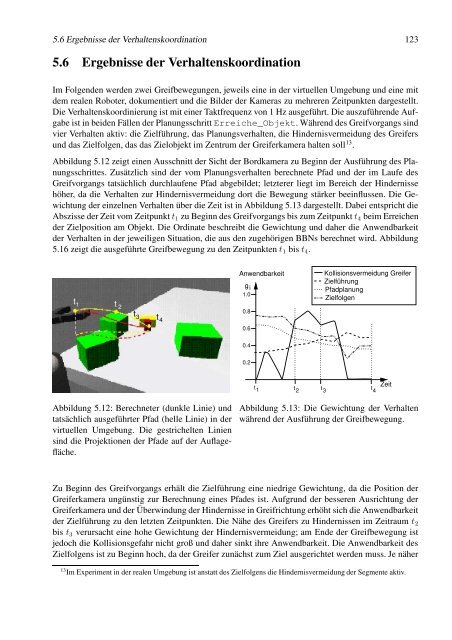
Abbildung 5.12 zeigt einen Ausschnitt der Sicht der Bordkamera zu Beginn der Ausführung des Planungsschrittes.<br />
Zusätzlich sind der vom Planungsverhalten berechnete Pfad und der im Laufe des<br />
Greifvorgangs tatsächlich durchlaufene Pfad abgebildet; letzterer liegt im Bereich der Hindernisse<br />
höher, da die Verhalten zur Hindernisvermeidung dort die Bewegung stärker beeinflussen. Die Gewichtung<br />
der einzelnen Verhalten über die Zeit ist in Abbildung 5.13 dargestellt. Dabei entspricht die<br />
Abszisse der Zeit vom Zeitpunkt t1 zu Beginn des Greifvorgangs bis zum Zeitpunkt t4 beim Erreichen<br />
der Zielposition am Objekt. Die Ordinate beschreibt die Gewichtung und daher die Anwendbarkeit<br />
der Verhalten in der jeweiligen Situation, die aus den zugehörigen BBNs berechnet wird. Abbildung<br />
5.16 zeigt die ausgeführte Greifbewegung zu den Zeitpunkten t1 bis t4.<br />
t1 t<br />
2<br />
t3 t<br />
Abbildung 5.12: Berechneter (dunkle Linie) und<br />
tatsächlich ausgeführter Pfad (helle Linie) in der<br />
virtuellen Umgebung. Die gestrichelten Linien<br />
sind die Projektionen der Pfade auf der Auflagefläche.<br />
4<br />
Anwendbarkeit<br />
gi<br />
1.0<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
t 1<br />
t 2<br />
Kollisionsvermeidung Greifer<br />
Zielführung<br />
Pfadplanung<br />
Zielfolgen<br />
t 3<br />
t 4<br />
Zeit<br />
Abbildung 5.13: Die Gewichtung der Verhalten<br />
während der Ausführung der Greifbewegung.<br />
Zu Beginn des Greifvorgangs erhält die Zielführung eine niedrige Gewichtung, da die Position der<br />
Greiferkamera ungünstig zur Berechnung eines Pfades ist. Aufgrund der besseren Ausrichtung der<br />
Greiferkamera und der Überwindung der Hindernisse in Greifrichtung erhöht sich die Anwendbarkeit<br />
der Zielführung zu den letzten Zeitpunkten. Die Nähe des Greifers zu Hindernissen im Zeitraum t2<br />
bis t3 verursacht eine hohe Gewichtung der Hindernisvermeidung; am Ende der Greifbewegung ist<br />
jedoch die Kollisionsgefahr nicht groß und daher sinkt ihre Anwendbarkeit. Die Anwendbarkeit des<br />
Zielfolgens ist zu Beginn hoch, da der Greifer zunächst zum Ziel ausgerichtet werden muss. Je näher<br />
13 Im Experiment in der realen Umgebung ist anstatt des Zielfolgens die Hindernisvermeidung der Segmente aktiv.














