

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
60 3.2 Abgleich der Daten virtueller und realer Kameras<br />
X O<br />
W<br />
O<br />
T<br />
ZO<br />
O<br />
Objekt System<br />
Y<br />
O<br />
MB<br />
P<br />
P<br />
X<br />
Y<br />
W<br />
W<br />
K1<br />
T<br />
Welt System<br />
Z<br />
W<br />
G<br />
T<br />
K1<br />
Z<br />
G<br />
Greiferkamera<br />
System<br />
Z<br />
X<br />
K1<br />
K1<br />
Y<br />
G<br />
X<br />
G Y<br />
K1<br />
Greifer System<br />
W<br />
P<br />
T<br />
T<br />
Manipulator−<br />
basis<br />
System<br />
Z<br />
Y<br />
Z<br />
K2<br />
Plattform System<br />
X Z<br />
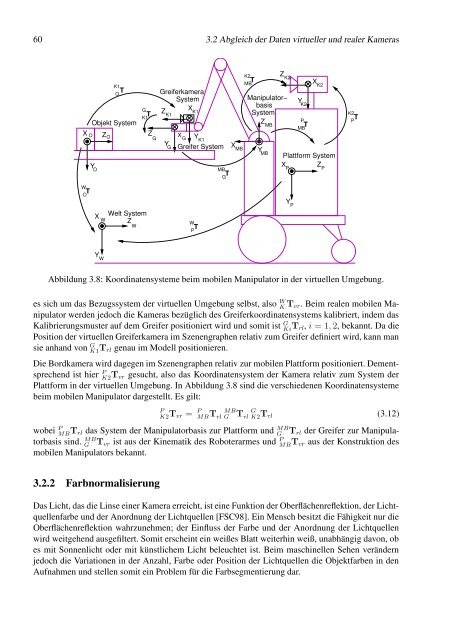
Abbildung 3.8: Koordinatensysteme beim mobilen Manipulator in der virtuellen Umgebung.<br />
es sich um das Bezugssystem der virtuellen Umgebung selbst, also W K Tvr. Beim realen mobilen Manipulator<br />
werden jedoch die Kameras bezüglich des Greiferkoordinatensystems kalibriert, indem das<br />
Kalibrierungsmuster auf dem Greifer positioniert wird und somit ist G Ki Trl, i = 1, 2, bekannt. Da die<br />
Position der virtuellen Greiferkamera im Szenengraphen relativ zum Greifer definiert wird, kann man<br />
sie anhand von G K1 Trl genau im Modell positionieren.<br />
Die Bordkamera wird dagegen im Szenengraphen relativ zur mobilen Plattform positioniert. Dementsprechend<br />
ist hier P K2 Tvr gesucht, also das Koordinatensystem der Kamera relativ zum System der<br />
Plattform in der virtuellen Umgebung. In Abbildung 3.8 sind die verschiedenen Koordinatensysteme<br />
beim mobilen Manipulator dargestellt. Es gilt:<br />
G<br />
X MB<br />
K2<br />
T<br />
MB<br />
MB<br />
MB<br />
P<br />
K2Tvr = P MBT rl MB<br />
G T rl G K2Trl (3.12)<br />
wobei P MBTrl das System der Manipulatorbasis zur Plattform und MB<br />
G Trl der Greifer zur Manipulatorbasis<br />
sind. MB<br />
G Tvr ist aus der Kinematik des Roboterarmes und P MBTvr aus der Konstruktion des<br />
mobilen Manipulators bekannt.<br />
3.2.2 Farbnormalisierung<br />
Das Licht, das die Linse einer Kamera erreicht, ist eine Funktion der Oberflächenreflektion, der Lichtquellenfarbe<br />
und der Anordnung der Lichtquellen [FSC98]. Ein Mensch besitzt die Fähigkeit nur die<br />
Oberflächenreflektion wahrzunehmen; der Einfluss der Farbe und der Anordnung der Lichtquellen<br />
wird weitgehend ausgefiltert. Somit erscheint ein weißes Blatt weiterhin weiß, unabhängig davon, ob<br />
es mit Sonnenlicht oder mit künstlichem Licht beleuchtet ist. Beim maschinellen Sehen verändern<br />
jedoch die Variationen in der Anzahl, Farbe oder Position der Lichtquellen die Objektfarben in den<br />
Aufnahmen und stellen somit ein Problem für die Farbsegmentierung dar.<br />
Y<br />
P<br />
Y K2<br />
P<br />
MB<br />
T<br />
X<br />
K2<br />
K2<br />
T<br />
P














