

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
80 4.1 Bildgestützte Zielführung<br />
4.1.4 Erlernen der generierten Pfade<br />
Für das Erlernen des Verhaltens werden alle beim algorithmischen Teach-In generierten Pfade mit einer<br />
immer gleichen Anzahl von Abstandsregionen aufgeteilt (Abbildung 4.5). In einer Abstandsregion<br />
wird der virtuelle Manipulator auf jedem Pfad platziert und die Greiferkamera akquiriert eine Aufnahme<br />
des Zielobjektes. Die Bildverarbeitungskomponente extrahiert anschließend aus jeder Aufnahme<br />
den Merkmalsvektor �sP j 10 . Alle Eingangs-Ausgangspaare (�sP j, j) aus derselben Abstandsregion werden<br />
für das Training des entsprechenden RBF-Netzwerkes verwendet, das für diese Abstandsregion<br />
spezialisiert ist. Diese Prozedur wiederholt sich für jede Abstandsregion und somit für jedes RBF der<br />
zweiten Ebene, bis die Region um das Objekt, bei der ein Greifvorgang noch möglich ist, abgedeckt<br />
wird.<br />
Für das RBF der ersten Ebene kommen alle akquirierten Bilder, gruppiert nach ihrem Abstand vom<br />
Objekt, zum Einsatz. Sei mit i die Distanzregion relativ zum Objekt notiert, aus der die Aufnahmen<br />
gemacht wurden, dann bestehen die Trainingsdaten aus (�sA1i, ..., �sAji, ..., �sAni, i), wobei der Index j<br />
den Pfad angibt, auf dem das Kamerabild aufgenommen wurde.<br />
4.1.5 Resultate des Trainings und Evaluierung der Zielführung<br />
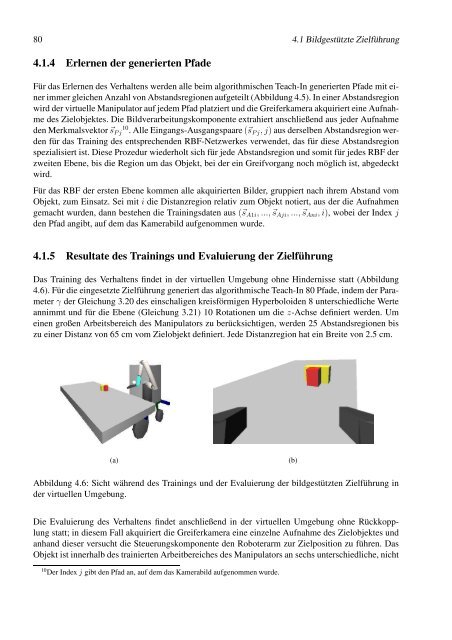
Das Training des Verhaltens findet in der virtuellen Umgebung ohne Hindernisse statt (Abbildung<br />
4.6). Für die eingesetzte Zielführung generiert das algorithmische Teach-In 80 Pfade, indem der Parameter<br />
γ der Gleichung 3.20 des einschaligen kreisförmigen Hyperboloiden 8 unterschiedliche Werte<br />
annimmt und für die Ebene (Gleichung 3.21) 10 Rotationen um die z-Achse definiert werden. Um<br />
einen großen Arbeitsbereich des Manipulators zu berücksichtigen, werden 25 Abstandsregionen bis<br />
zu einer Distanz von 65 cm vom Zielobjekt definiert. Jede Distanzregion hat ein Breite von 2.5 cm.<br />
(a) (b)<br />
Abbildung 4.6: Sicht während des Trainings und der Evaluierung der bildgestützten Zielführung in<br />
der virtuellen Umgebung.<br />
Die Evaluierung des Verhaltens findet anschließend in der virtuellen Umgebung ohne Rückkopplung<br />
statt; in diesem Fall akquiriert die Greiferkamera eine einzelne Aufnahme des Zielobjektes und<br />
anhand dieser versucht die Steuerungskomponente den Roboterarm zur Zielposition zu führen. Das<br />
Objekt ist innerhalb des trainierten Arbeitbereiches des Manipulators an sechs unterschiedliche, nicht<br />
10 Der Index j gibt den Pfad an, auf dem das Kamerabild aufgenommen wurde.














