

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.4 Planung 35<br />
die Welt, die aus einer symbolischen Darstellung der Umgebung stammt, statt. Bei reaktiven Planern<br />
wird jedoch die nächste Aktion anhand der aktuellen Sensorinformation, dem Ergebnis der letzten<br />
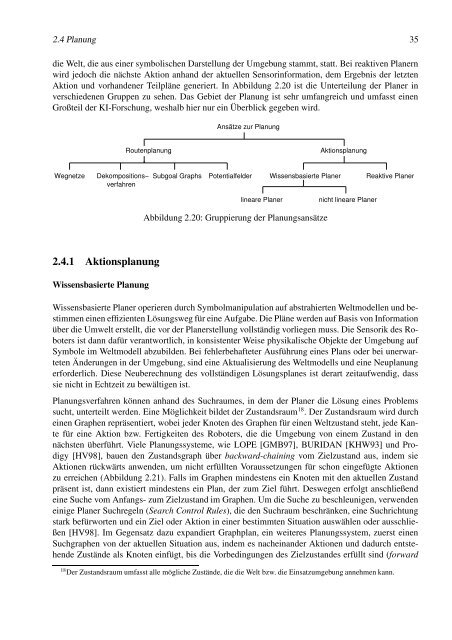
Aktion und vorhandener Teilpläne generiert. In Abbildung 2.20 ist die Unterteilung der Planer in<br />
verschiedenen Gruppen zu sehen. Das Gebiet der Planung ist sehr umfangreich und umfasst einen<br />
Großteil der KI-Forschung, weshalb hier nur ein Überblick gegeben wird.<br />
Routenplanung<br />
Wegnetze Dekompositions−<br />
verfahren<br />
2.4.1 Aktionsplanung<br />
Wissensbasierte Planung<br />
Ansätze zur Planung<br />
Subgoal Graphs Potentialfelder<br />
Aktionsplanung<br />
Wissensbasierte Planer Reaktive Planer<br />
lineare Planer nicht lineare Planer<br />
Abbildung 2.20: Gruppierung der Planungsansätze<br />
Wissensbasierte Planer operieren durch Symbolmanipulation auf abstrahierten Weltmodellen und bestimmen<br />
einen effizienten Lösungsweg für eine Aufgabe. Die Pläne werden auf Basis von Information<br />
über die Umwelt erstellt, die vor der Planerstellung vollständig vorliegen muss. Die Sensorik des Roboters<br />
ist dann dafür verantwortlich, in konsistenter Weise physikalische Objekte der Umgebung auf<br />
Symbole im Weltmodell abzubilden. Bei fehlerbehafteter Ausführung eines Plans oder bei unerwarteten<br />
Änderungen in der Umgebung, sind eine Aktualisierung des Weltmodells und eine Neuplanung<br />
erforderlich. Diese Neuberechnung des vollständigen Lösungsplanes ist derart zeitaufwendig, dass<br />
sie nicht in Echtzeit zu bewältigen ist.<br />
Planungsverfahren können anhand des Suchraumes, in dem der Planer die Lösung eines Problems<br />
sucht, unterteilt werden. Eine Möglichkeit bildet der Zustandsraum 18 . Der Zustandsraum wird durch<br />
einen Graphen repräsentiert, wobei jeder Knoten des Graphen für einen Weltzustand steht, jede Kante<br />
für eine Aktion bzw. Fertigkeiten des Roboters, die die Umgebung von einem Zustand in den<br />
nächsten überführt. Viele Planungssysteme, wie LOPE [GMB97], BURIDAN [KHW93] und Prodigy<br />
[HV98], bauen den Zustandsgraph über backward-chaining vom Zielzustand aus, indem sie<br />
Aktionen rückwärts anwenden, um nicht erfüllten Voraussetzungen für schon eingefügte Aktionen<br />
zu erreichen (Abbildung 2.21). Falls im Graphen mindestens ein Knoten mit den aktuellen Zustand<br />
präsent ist, dann existiert mindestens ein Plan, der zum Ziel führt. Deswegen erfolgt anschließend<br />
eine Suche vom Anfangs- zum Zielzustand im Graphen. Um die Suche zu beschleunigen, verwenden<br />
einige Planer Suchregeln (Search Control Rules), die den Suchraum beschränken, eine Suchrichtung<br />
stark befürworten und ein Ziel oder Aktion in einer bestimmten Situation auswählen oder ausschließen<br />
[HV98]. Im Gegensatz dazu expandiert Graphplan, ein weiteres Planungssystem, zuerst einen<br />
Suchgraphen von der aktuellen Situation aus, indem es nacheinander Aktionen und dadurch entstehende<br />
Zustände als Knoten einfügt, bis die Vorbedingungen des Zielzustandes erfüllt sind (forward<br />
18 Der Zustandsraum umfasst alle mögliche Zustände, die die Welt bzw. die Einsatzumgebung annehmen kann.














