

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
12 2.1 Allgemeine Systemarchitekturen für Roboter<br />
ten Systemen tendiert.<br />
Auf mobile Manipulatoren kommen hauptsächlich hybride Ansätze zum Einsatz, wie beispielsweise<br />
in [BK95], [Bro90], [FMB + 97], [NY97], [WN01], [MA99], [Pet02], [HB01], [IS01] und [Ste94] 1 .<br />
Durch die Kombination von mobiler Plattform und Roboterarm stellen sich jedoch bei den mobilen<br />
Manipulatoren komplexere Fragestellungen und höhere Anforderungen als in den Bereichen der<br />
stationären Manipulation und der autonomen Navigation. Deswegen können Architekturen, die für<br />
stationäre Roboterarme oder mobile Plattformen entwickelt sind, nicht direkt auf mobile Manipulatoren<br />
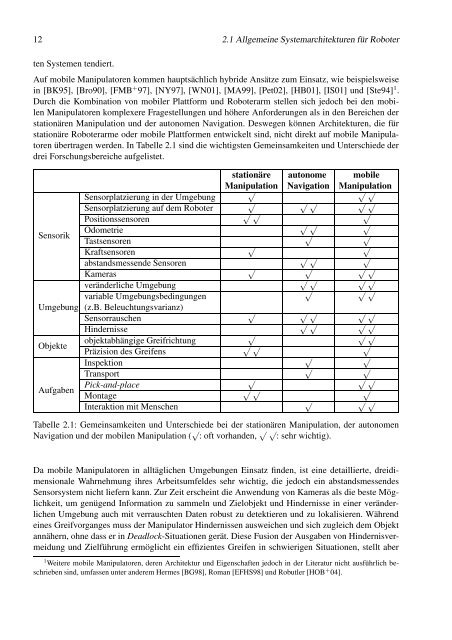
übertragen werden. In Tabelle 2.1 sind die wichtigsten Gemeinsamkeiten und Unterschiede der<br />
drei Forschungsbereiche aufgelistet.<br />
Sensorik<br />
Umgebung<br />
Objekte<br />
Aufgaben<br />
Sensorplatzierung in der Umgebung<br />
Sensorplatzierung auf dem Roboter<br />
Positionssensoren<br />
Odometrie<br />
Tastsensoren<br />
Kraftsensoren<br />
abstandsmessende Sensoren<br />
Kameras<br />
veränderliche Umgebung<br />
variable Umgebungsbedingungen<br />
(z.B. Beleuchtungsvarianz)<br />
Sensorrauschen<br />
Hindernisse<br />
objektabhängige Greifrichtung<br />
Präzision des Greifens<br />
Inspektion<br />
Transport<br />
Pick-and-place<br />
Montage<br />
Interaktion mit Menschen<br />
stationäre autonome mobile<br />
Manipulation<br />
√<br />
Navigation Manipulation<br />
√ √<br />
√ √ √ √ √<br />
√ √ √<br />
√ √ √<br />
√ √<br />
√ √<br />
√ √ √<br />
√ √ √ √<br />
√ √ √ √<br />
√ √ √<br />
√ √ √ √ √<br />
√ √ √ √<br />
√ √ √<br />
√ √ √<br />
√ √<br />
√ √<br />
√ √ √<br />
√ √ √<br />
√ √ √<br />
Tabelle 2.1: Gemeinsamkeiten und Unterschiede bei der stationären Manipulation, der autonomen<br />
Navigation und der mobilen Manipulation ( √ : oft vorhanden, √ √ : sehr wichtig).<br />
Da mobile Manipulatoren in alltäglichen Umgebungen Einsatz finden, ist eine detaillierte, dreidimensionale<br />
Wahrnehmung ihres Arbeitsumfeldes sehr wichtig, die jedoch ein abstandsmessendes<br />
Sensorsystem nicht liefern kann. Zur Zeit erscheint die Anwendung von Kameras als die beste Möglichkeit,<br />
um genügend Information zu sammeln und Zielobjekt und Hindernisse in einer veränderlichen<br />
Umgebung auch mit verrauschten Daten robust zu detektieren und zu lokalisieren. Während<br />
eines Greifvorganges muss der Manipulator Hindernissen ausweichen und sich zugleich dem Objekt<br />
annähern, ohne dass er in Deadlock-Situationen gerät. Diese Fusion der Ausgaben von Hindernisvermeidung<br />
und Zielführung ermöglicht ein effizientes Greifen in schwierigen Situationen, stellt aber<br />
1 Weitere mobile Manipulatoren, deren Architektur und Eigenschaften jedoch in der Literatur nicht ausführlich beschrieben<br />
sind, umfassen unter anderem Hermes [BG98], Roman [EFHS98] und Robutler [HOB + 04].














