

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.2 Abgleich der Daten virtueller und realer Kameras 59<br />
Betrachtet man diesen Raumpunkt aus derselben Position mit der virtuellen Kamera, dann ist dieser<br />
Raumpunkt auf den homogenen Pixelkoordinaten (Uvr, Vvr, Wvr) T abgebildet:<br />
wobei mit vr die virtuelle Kamera gekennzeichnet ist.<br />
(Uvr, Vvr, Wvr) T = Kvr M K WTvr W � P (3.8)<br />
Aus Gleichungen 3.8 und 3.7 folgt die Gleichung zur Transformation des Bildes der realen Kamera<br />
in eine entsprechende Aufnahme der virtuellen Kamera:<br />
(Uvr, Vvr, Wvr) T = Kvr M K WTvr K WT −1<br />
rl MT K −1<br />
rl (Url, Vrl, Wrl) T<br />
Stimmt die Position der beiden Kameras überein, dann ist K W Tvr = K W Trl :<br />
(Uvr, Vvr, Wvr) T = Kvr K −1<br />
rl (Url, Vrl, Wrl) T<br />
Die entsprechenden Pixelkoordinaten der transformierten Aufnahme sind dann:<br />
(uvr, vvr, 1) T = ( Uvr<br />
Wvr<br />
, Vvr<br />
, 1)<br />
Wvr<br />
T<br />
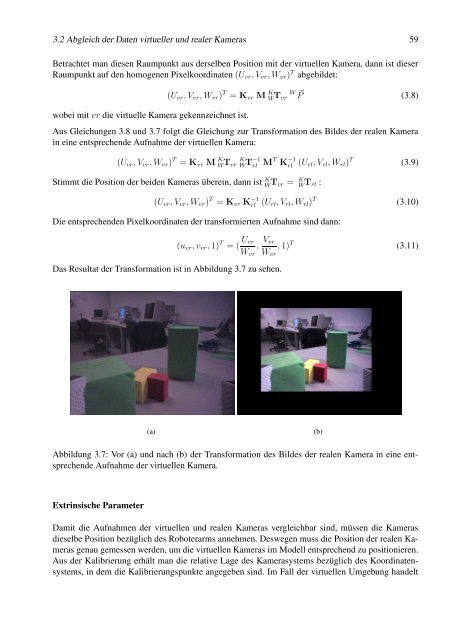
Das Resultat der Transformation ist in Abbildung 3.7 zu sehen.<br />
(a) (b)<br />
(3.9)<br />
(3.10)<br />
(3.11)<br />
Abbildung 3.7: Vor (a) und nach (b) der Transformation des Bildes der realen Kamera in eine entsprechende<br />
Aufnahme der virtuellen Kamera.<br />
Extrinsische Parameter<br />
Damit die Aufnahmen der virtuellen und realen Kameras vergleichbar sind, müssen die Kameras<br />
dieselbe Position bezüglich des Roboterarms annehmen. Deswegen muss die Position der realen Kameras<br />
genau gemessen werden, um die virtuellen Kameras im Modell entsprechend zu positionieren.<br />
Aus der Kalibrierung erhält man die relative Lage des Kamerasystems bezüglich des Koordinatensystems,<br />
in dem die Kalibrierungspunkte angegeben sind. Im Fall der virtuellen Umgebung handelt














