

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
10 2.1 Allgemeine Systemarchitekturen für Roboter<br />
Aktionen auszuführen sind und das Weltmodell dem realen Zustand der Welt entspricht. Dies ist<br />
jedoch bei mobilen Manipulatoren nicht der Fall, die in nur teilweise bekannten, veränderlichen Umgebungen<br />
ihre Aufgaben durchführen müssen.<br />
Sensordaten<br />
Verarbeitung<br />
Sensordaten<br />
& Weltmodell<br />
Planungs−<br />
agent<br />
(a)<br />
Ausführende<br />
Komponente<br />
Roboteraktion<br />
Sensor−<br />
daten<br />
Verhalten<br />
Objektsuche<br />
Exploration<br />
Wandfolgen<br />
Zielführung<br />
Hindernis−<br />
vermeidung<br />
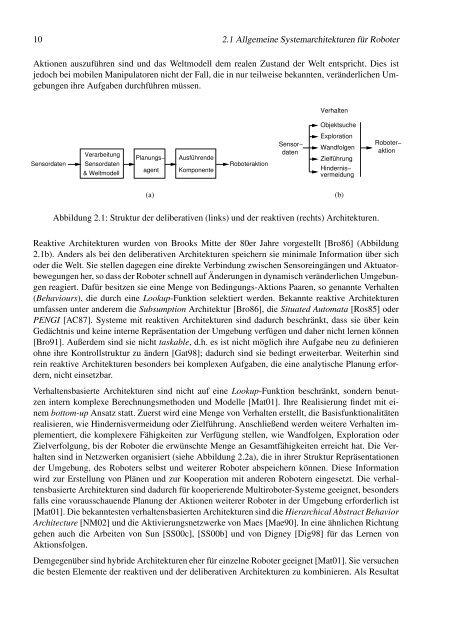
Abbildung 2.1: Struktur der deliberativen (links) und der reaktiven (rechts) Architekturen.<br />
(b)<br />
Roboter−<br />
aktion<br />
Reaktive Architekturen wurden von Brooks Mitte der 80er Jahre vorgestellt [Bro86] (Abbildung<br />
2.1b). Anders als bei den deliberativen Architekturen speichern sie minimale Information über sich<br />
oder die Welt. Sie stellen dagegen eine direkte Verbindung zwischen Sensoreingängen und Aktuatorbewegungen<br />
her, so dass der Roboter schnell auf Änderungen in dynamisch veränderlichen Umgebungen<br />
reagiert. Dafür besitzen sie eine Menge von Bedingungs-Aktions Paaren, so genannte Verhalten<br />
(Behaviours), die durch eine Lookup-Funktion selektiert werden. Bekannte reaktive Architekturen<br />
umfassen unter anderem die Subsumption Architektur [Bro86], die Situated Automata [Ros85] oder<br />
PENGI [AC87]. Systeme mit reaktiven Architekturen sind dadurch beschränkt, dass sie über kein<br />
Gedächtnis und keine interne Repräsentation der Umgebung verfügen und daher nicht lernen können<br />
[Bro91]. Außerdem sind sie nicht taskable, d.h. es ist nicht möglich ihre Aufgabe neu zu definieren<br />
ohne ihre Kontrollstruktur zu ändern [Gat98]; dadurch sind sie bedingt erweiterbar. Weiterhin sind<br />
rein reaktive Architekturen besonders bei komplexen Aufgaben, die eine analytische Planung erfordern,<br />
nicht einsetzbar.<br />
Verhaltensbasierte Architekturen sind nicht auf eine Lookup-Funktion beschränkt, sondern benutzen<br />
intern komplexe Berechnungsmethoden und Modelle [Mat01]. Ihre Realisierung findet mit einem<br />
bottom-up Ansatz statt. Zuerst wird eine Menge von Verhalten erstellt, die Basisfunktionalitäten<br />
realisieren, wie Hindernisvermeidung oder Zielführung. Anschließend werden weitere Verhalten implementiert,<br />
die komplexere Fähigkeiten zur Verfügung stellen, wie Wandfolgen, Exploration oder<br />
Zielverfolgung, bis der Roboter die erwünschte Menge an Gesamtfähigkeiten erreicht hat. Die Verhalten<br />
sind in Netzwerken organisiert (siehe Abbildung 2.2a), die in ihrer Struktur Repräsentationen<br />
der Umgebung, des Roboters selbst und weiterer Roboter abspeichern können. Diese Information<br />
wird zur Erstellung von Plänen und zur Kooperation mit anderen Robotern eingesetzt. Die verhaltensbasierte<br />
Architekturen sind dadurch für kooperierende Multiroboter-Systeme geeignet, besonders<br />
falls eine vorausschauende Planung der Aktionen weiterer Roboter in der Umgebung erforderlich ist<br />
[Mat01]. Die bekanntesten verhaltensbasierten Architekturen sind die Hierarchical Abstract Behavior<br />
Architecture [NM02] und die Aktivierungsnetzwerke von Maes [Mae90]. In eine ähnlichen Richtung<br />
gehen auch die Arbeiten von Sun [SS00c], [SS00b] und von Digney [Dig98] für das Lernen von<br />
Aktionsfolgen.<br />
Demgegenüber sind hybride Architekturen eher für einzelne Roboter geeignet [Mat01]. Sie versuchen<br />
die besten Elemente der reaktiven und der deliberativen Architekturen zu kombinieren. Als Resultat














