

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
14 2.2 Reaktive Verhalten für Manipulatoren<br />
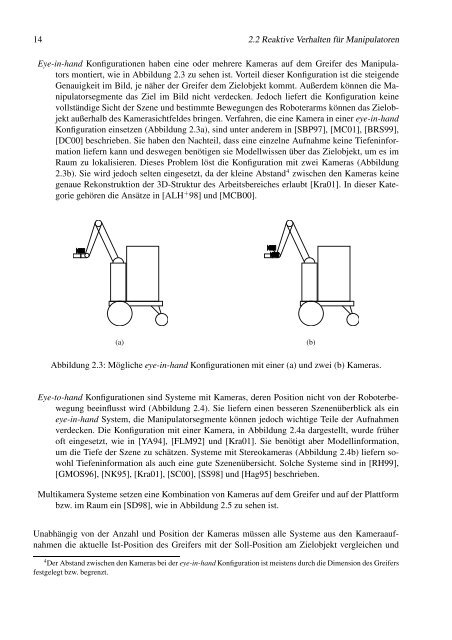
Eye-in-hand Konfigurationen haben eine oder mehrere Kameras auf dem Greifer des Manipulators<br />
montiert, wie in Abbildung 2.3 zu sehen ist. Vorteil dieser Konfiguration ist die steigende<br />
Genauigkeit im Bild, je näher der Greifer dem Zielobjekt kommt. Außerdem können die Manipulatorsegmente<br />
das Ziel im Bild nicht verdecken. Jedoch liefert die Konfiguration keine<br />
vollständige Sicht der Szene und bestimmte Bewegungen des Roboterarms können das Zielobjekt<br />
außerhalb des Kamerasichtfeldes bringen. Verfahren, die eine Kamera in einer eye-in-hand<br />
Konfiguration einsetzen (Abbildung 2.3a), sind unter anderem in [SBP97], [MC01], [BRS99],<br />
[DC00] beschrieben. Sie haben den Nachteil, dass eine einzelne Aufnahme keine Tiefeninformation<br />
liefern kann und deswegen benötigen sie Modellwissen über das Zielobjekt, um es im<br />
Raum zu lokalisieren. Dieses Problem löst die Konfiguration mit zwei Kameras (Abbildung<br />
2.3b). Sie wird jedoch selten eingesetzt, da der kleine Abstand 4 zwischen den Kameras keine<br />
genaue Rekonstruktion der 3D-Struktur des Arbeitsbereiches erlaubt [Kra01]. In dieser Kategorie<br />
gehören die Ansätze in [ALH + 98] und [MCB00].<br />
(a) (b)<br />
Abbildung 2.3: Mögliche eye-in-hand Konfigurationen mit einer (a) und zwei (b) Kameras.<br />
Eye-to-hand Konfigurationen sind Systeme mit Kameras, deren Position nicht von der Roboterbewegung<br />
beeinflusst wird (Abbildung 2.4). Sie liefern einen besseren Szenenüberblick als ein<br />
eye-in-hand System, die Manipulatorsegmente können jedoch wichtige Teile der Aufnahmen<br />
verdecken. Die Konfiguration mit einer Kamera, in Abbildung 2.4a dargestellt, wurde früher<br />
oft eingesetzt, wie in [YA94], [FLM92] und [Kra01]. Sie benötigt aber Modellinformation,<br />
um die Tiefe der Szene zu schätzen. Systeme mit Stereokameras (Abbildung 2.4b) liefern sowohl<br />
Tiefeninformation als auch eine gute Szenenübersicht. Solche Systeme sind in [RH99],<br />
[GMOS96], [NK95], [Kra01], [SC00], [SS98] und [Hag95] beschrieben.<br />
Multikamera Systeme setzen eine Kombination von Kameras auf dem Greifer und auf der Plattform<br />
bzw. im Raum ein [SD98], wie in Abbildung 2.5 zu sehen ist.<br />
Unabhängig von der Anzahl und Position der Kameras müssen alle Systeme aus den Kameraaufnahmen<br />
die aktuelle Ist-Position des Greifers mit der Soll-Position am Zielobjekt vergleichen und<br />
4 Der Abstand zwischen den Kameras bei der eye-in-hand Konfiguration ist meistens durch die Dimension des Greifers<br />
festgelegt bzw. begrenzt.














