

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
24 2.2 Reaktive Verhalten für Manipulatoren<br />
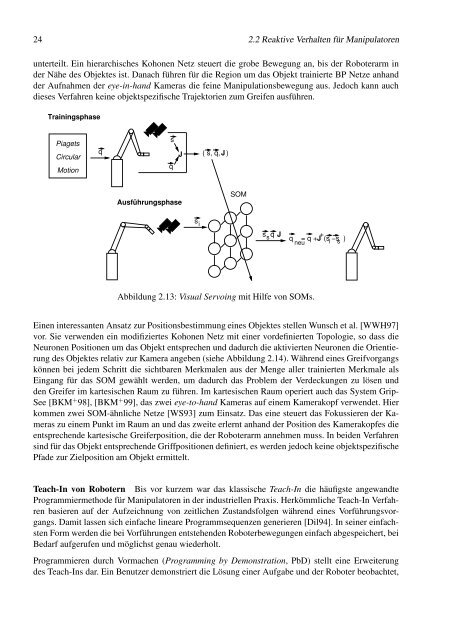
unterteilt. Ein hierarchisches Kohonen Netz steuert die grobe Bewegung an, bis der Roboterarm in<br />
der Nähe des Objektes ist. Danach führen für die Region um das Objekt trainierte BP Netze anhand<br />
der Aufnahmen der eye-in-hand Kameras die feine Manipulationsbewegung aus. Jedoch kann auch<br />
dieses Verfahren keine objektspezifische Trajektorien zum Greifen ausführen.<br />
Trainingsphase<br />
Piagets<br />
Circular<br />
Motion<br />
q<br />
s<br />
q<br />
J<br />
Ausführungsphase<br />
si<br />
( s, q, J )<br />
SOM<br />
ss q J<br />
Abbildung 2.13: Visual Servoing mit Hilfe von SOMs.<br />
q = q + J<br />
neu +<br />
(s i −s s )<br />
Einen interessanten Ansatz zur Positionsbestimmung eines Objektes stellen Wunsch et al. [WWH97]<br />
vor. Sie verwenden ein modifiziertes Kohonen Netz mit einer vordefinierten Topologie, so dass die<br />
Neuronen Positionen um das Objekt entsprechen und dadurch die aktivierten Neuronen die Orientierung<br />
des Objektes relativ zur Kamera angeben (siehe Abbildung 2.14). Während eines Greifvorgangs<br />
können bei jedem Schritt die sichtbaren Merkmalen aus der Menge aller trainierten Merkmale als<br />
Eingang für das SOM gewählt werden, um dadurch das Problem der Verdeckungen zu lösen und<br />
den Greifer im kartesischen Raum zu führen. Im kartesischen Raum operiert auch das System Grip-<br />
See [BKM + 98], [BKM + 99], das zwei eye-to-hand Kameras auf einem Kamerakopf verwendet. Hier<br />
kommen zwei SOM-ähnliche Netze [WS93] zum Einsatz. Das eine steuert das Fokussieren der Kameras<br />
zu einem Punkt im Raum an und das zweite erlernt anhand der Position des Kamerakopfes die<br />
entsprechende kartesische Greiferposition, die der Roboterarm annehmen muss. In beiden Verfahren<br />
sind für das Objekt entsprechende Griffpositionen definiert, es werden jedoch keine objektspezifische<br />
Pfade zur Zielposition am Objekt ermittelt.<br />
Teach-In von Robotern Bis vor kurzem war das klassische Teach-In die häufigste angewandte<br />
Programmiermethode für Manipulatoren in der industriellen Praxis. Herkömmliche Teach-In Verfahren<br />
basieren auf der Aufzeichnung von zeitlichen Zustandsfolgen während eines Vorführungsvorgangs.<br />
Damit lassen sich einfache lineare Programmsequenzen generieren [Dil94]. In seiner einfachsten<br />
Form werden die bei Vorführungen entstehenden Roboterbewegungen einfach abgespeichert, bei<br />
Bedarf aufgerufen und möglichst genau wiederholt.<br />
Programmieren durch Vormachen (Programming by Demonstration, PbD) stellt eine Erweiterung<br />
des Teach-Ins dar. Ein Benutzer demonstriert die Lösung einer Aufgabe und der Roboter beobachtet,














