

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
C.1 Theoretische Grundlagen der Manipulatorkinematik 183<br />
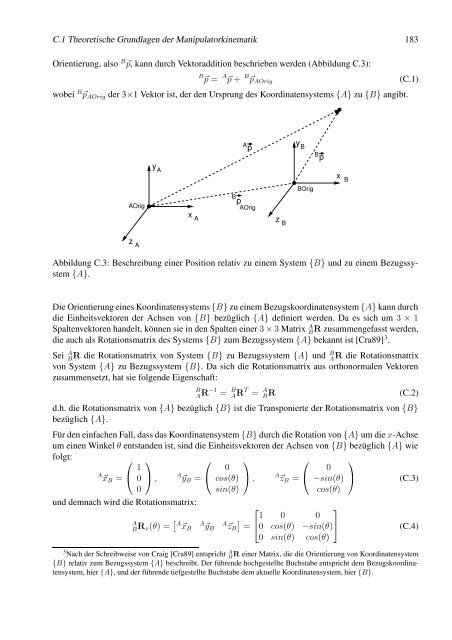
Orientierung, also B �p, kann durch Vektoraddition beschrieben werden (Abbildung C.3):<br />
B �p = A �p + B �pAOrig<br />
wobei B �pAOrig der 3×1 Vektor ist, der den Ursprung des Koordinatensystems {A} zu {B} angibt.<br />
AOrig<br />
z<br />
A<br />
y<br />
A<br />
x<br />
A<br />
B<br />
p<br />
A p<br />
AOrig<br />
z<br />
B<br />
y<br />
B<br />
BOrig<br />
B p<br />
x<br />
B<br />
(C.1)<br />
Abbildung C.3: Beschreibung einer Position relativ zu einem System {B} und zu einem Bezugssystem<br />
{A}.<br />
Die Orientierung eines Koordinatensystems {B} zu einem Bezugskoordinatensystem {A} kann durch<br />
die Einheitsvektoren der Achsen von {B} bezüglich {A} definiert werden. Da es sich um 3 × 1<br />
Spaltenvektoren handelt, können sie in den Spalten einer 3 × 3 Matrix A BR zusammengefasst werden,<br />
die auch als Rotationsmatrix des Systems {B} zum Bezugssystem {A} bekannt ist [Cra89] 3 .<br />
Sei A BR die Rotationsmatrix von System {B} zu Bezugssystem {A} und B AR die Rotationsmatrix<br />
von System {A} zu Bezugssystem {B}. Da sich die Rotationsmatrix aus orthonormalen Vektoren<br />
zusammensetzt, hat sie folgende Eigenschaft:<br />
B<br />
AR−1 = B ART = A BR (C.2)<br />
d.h. die Rotationsmatrix von {A} bezüglich {B} ist die Transponierte der Rotationsmatrix von {B}<br />
bezüglich {A}.<br />
Für den einfachen Fall, dass das Koordinatensystem {B} durch die Rotation von {A} um die x-Achse<br />
um einen Winkel θ entstanden ist, sind die Einheitsvektoren der Achsen von {B} bezüglich {A} wie<br />
folgt:<br />
⎛ ⎞<br />
1<br />
A<br />
�xB = ⎝ 0 ⎠ A<br />
, �yB =<br />
0<br />
und demnach wird die Rotationsmatrix:<br />
⎛<br />
⎝<br />
0<br />
cos(θ)<br />
sin(θ)<br />
⎞<br />
⎠ ,<br />
A<br />
BRx(θ) = � A�xB A�yB A �<br />
�zB =<br />
⎛<br />
A<br />
�zB = ⎝<br />
0<br />
−sin(θ)<br />
cos(θ)<br />
⎞<br />
⎠ (C.3)<br />
⎡<br />
1 0 0<br />
⎤<br />
⎣0<br />
cos(θ) −sin(θ) ⎦ (C.4)<br />
0 sin(θ) cos(θ)<br />
3 Nach der Schreibweise von Craig [Cra89] entspricht A B R einer Matrix, die die Orientierung von Koordinatensystem<br />
{B} relativ zum Bezugssystem {A} beschreibt. Der führende hochgestellte Buchstabe entspricht dem Bezugskoordinatensystem,<br />
hier {A}, und der führende tiefgestellte Buchstabe dem aktuelle Koordinatensystem, hier {B}.














