

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
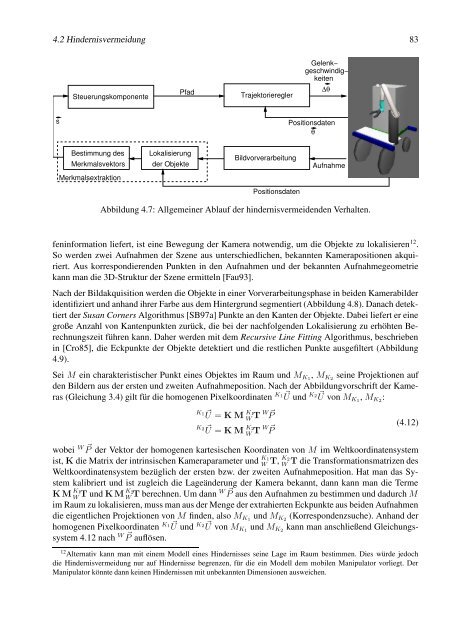
4.2 Hindernisvermeidung 83<br />
Steuerungskomponente<br />
Pfad<br />
Trajektorieregler<br />
Gelenk−<br />
geschwindig−<br />
keiten<br />
s Positionsdaten<br />
θ<br />
Bestimmung des<br />
Merkmalsvektors<br />
Merkmalsextraktion<br />
Lokalisierung<br />
der Objekte<br />
Bildvorverarbeitung<br />
Positionsdaten<br />
∆θ<br />
Aufnahme<br />
Abbildung 4.7: Allgemeiner Ablauf der hindernisvermeidenden Verhalten.<br />
feninformation liefert, ist eine Bewegung der Kamera notwendig, um die Objekte zu lokalisieren 12 .<br />
So werden zwei Aufnahmen der Szene aus unterschiedlichen, bekannten Kamerapositionen akquiriert.<br />
Aus korrespondierenden Punkten in den Aufnahmen und der bekannten Aufnahmegeometrie<br />
kann man die 3D-Struktur der Szene ermitteln [Fau93].<br />
Nach der Bildakquisition werden die Objekte in einer Vorverarbeitungsphase in beiden Kamerabilder<br />
identifiziert und anhand ihrer Farbe aus dem Hintergrund segmentiert (Abbildung 4.8). Danach detektiert<br />
der Susan Corners Algorithmus [SB97a] Punkte an den Kanten der Objekte. Dabei liefert er eine<br />
große Anzahl von Kantenpunkten zurück, die bei der nachfolgenden Lokalisierung zu erhöhten Berechnungszeit<br />
führen kann. Daher werden mit dem Recursive Line Fitting Algorithmus, beschrieben<br />
in [Cro85], die Eckpunkte der Objekte detektiert und die restlichen Punkte ausgefiltert (Abbildung<br />
4.9).<br />
Sei M ein charakteristischer Punkt eines Objektes im Raum und MK1, MK2 seine Projektionen auf<br />
den Bildern aus der ersten und zweiten Aufnahmeposition. Nach der Abbildungvorschrift der Kameras<br />
(Gleichung 3.4) gilt für die homogenen Pixelkoordinaten K1 � U und K2 � U von MK1, MK2:<br />
K1 � U = K M K1<br />
W T W� P<br />
K2 � U = K M K2<br />
W T W� P<br />
(4.12)<br />
wobei W P� der Vektor der homogenen kartesischen Koordinaten von M im Weltkoordinatensystem<br />
ist, K die Matrix der intrinsischen Kameraparameter und K1 K2<br />
W T, W T die Transformationsmatrizen des<br />
Weltkoordinatensystem bezüglich der ersten bzw. der zweiten Aufnahmeposition. Hat man das System<br />
kalibriert und ist zugleich die Lageänderung der Kamera bekannt, dann kann man die Terme<br />
K M K1<br />
K2<br />
W T und K M W T berechnen. Um dann W P� aus den Aufnahmen zu bestimmen und dadurch M<br />
im Raum zu lokalisieren, muss man aus der Menge der extrahierten Eckpunkte aus beiden Aufnahmen<br />
die eigentlichen Projektionen von M finden, also MK1 und MK2 (Korrespondenzsuche). Anhand der<br />
homogenen Pixelkoordinaten K1U� K2 und U� von MK1 und MK2 kann man anschließend Gleichungssystem<br />
4.12 nach W P� auflösen.<br />
12 Alternativ kann man mit einem Modell eines Hindernisses seine Lage im Raum bestimmen. Dies würde jedoch<br />
die Hindernisvermeidung nur auf Hindernisse begrenzen, für die ein Modell dem mobilen Manipulator vorliegt. Der<br />
Manipulator könnte dann keinen Hindernissen mit unbekannten Dimensionen ausweichen.














