

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
64 3.3 Teach-In in virtuellen Umgebungen<br />
Umgebung<br />
Merkmalsvektor<br />
Controller<br />
Lehrer<br />
Fehlersignal<br />
Ist−Ausgabe<br />
Soll−Ausgabe<br />
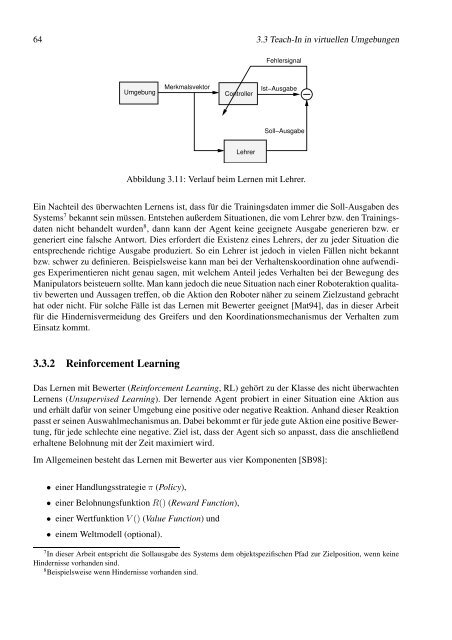
Abbildung 3.11: Verlauf beim Lernen mit Lehrer.<br />
Ein Nachteil des überwachten Lernens ist, dass für die Trainingsdaten immer die Soll-Ausgaben des<br />
Systems 7 bekannt sein müssen. Entstehen außerdem Situationen, die vom Lehrer bzw. den Trainingsdaten<br />
nicht behandelt wurden 8 , dann kann der Agent keine geeignete Ausgabe generieren bzw. er<br />
generiert eine falsche Antwort. Dies erfordert die Existenz eines Lehrers, der zu jeder Situation die<br />
entsprechende richtige Ausgabe produziert. So ein Lehrer ist jedoch in vielen Fällen nicht bekannt<br />
bzw. schwer zu definieren. Beispielsweise kann man bei der Verhaltenskoordination ohne aufwendiges<br />
Experimentieren nicht genau sagen, mit welchem Anteil jedes Verhalten bei der Bewegung des<br />
Manipulators beisteuern sollte. Man kann jedoch die neue Situation nach einer Roboteraktion qualitativ<br />
bewerten und Aussagen treffen, ob die Aktion den Roboter näher zu seinem Zielzustand gebracht<br />
hat oder nicht. Für solche Fälle ist das Lernen mit Bewerter geeignet [Mat94], das in dieser Arbeit<br />
für die Hindernisvermeidung des Greifers und den Koordinationsmechanismus der Verhalten zum<br />
Einsatz kommt.<br />
3.3.2 Reinforcement Learning<br />
Das Lernen mit Bewerter (Reinforcement Learning, RL) gehört zu der Klasse des nicht überwachten<br />
Lernens (Unsupervised Learning). Der lernende Agent probiert in einer Situation eine Aktion aus<br />
und erhält dafür von seiner Umgebung eine positive oder negative Reaktion. Anhand dieser Reaktion<br />
passt er seinen Auswahlmechanismus an. Dabei bekommt er für jede gute Aktion eine positive Bewertung,<br />
für jede schlechte eine negative. Ziel ist, dass der Agent sich so anpasst, dass die anschließend<br />
erhaltene Belohnung mit der Zeit maximiert wird.<br />
Im Allgemeinen besteht das Lernen mit Bewerter aus vier Komponenten [SB98]:<br />
• einer Handlungsstrategie π (Policy),<br />
• einer Belohnungsfunktion R() (Reward Function),<br />
• einer Wertfunktion V () (Value Function) und<br />
• einem Weltmodell (optional).<br />
7In dieser Arbeit entspricht die Sollausgabe des Systems dem objektspezifischen Pfad zur Zielposition, wenn keine<br />
Hindernisse vorhanden sind.<br />
8Beispielsweise wenn Hindernisse vorhanden sind.














