

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
36 2.4 Planung<br />
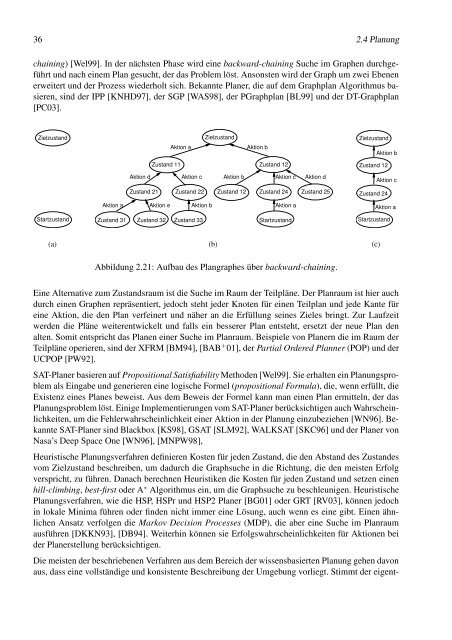
chaining) [Wel99]. In der nächsten Phase wird eine backward-chaining Suche im Graphen durchgeführt<br />
und nach einem Plan gesucht, der das Problem löst. Ansonsten wird der Graph um zwei Ebenen<br />
erweitert und der Prozess wiederholt sich. Bekannte Planer, die auf dem Graphplan Algorithmus basieren,<br />
sind der IPP [KNHD97], der SGP [WAS98], der PGraphplan [BL99] und der DT-Graphplan<br />
[PC03].<br />
Zielzustand<br />
Startzustand<br />
(a)<br />
Aktion d<br />
Zielzustand<br />
Aktion a Aktion b<br />
Zustand 11 Zustand 12<br />
Aktion c<br />
Aktion b Aktion c Aktion d<br />
Zustand 21 Zustand 22 Zustand 12 Zustand 24 Zustand 25<br />
Aktion a Aktion e Aktion b<br />
Aktion a<br />
Zustand 31 Zustand 32 Zustand 33<br />
Startzustand<br />
(b)<br />
Abbildung 2.21: Aufbau des Plangraphes über backward-chaining.<br />
Zielzustand<br />
Aktion b<br />
Zustand 12<br />
Aktion c<br />
Zustand 24<br />
Aktion a<br />
Startzustand<br />
Eine Alternative zum Zustandsraum ist die Suche im Raum der Teilpläne. Der Planraum ist hier auch<br />
durch einen Graphen repräsentiert, jedoch steht jeder Knoten für einen Teilplan und jede Kante für<br />
eine Aktion, die den Plan verfeinert und näher an die Erfüllung seines Zieles bringt. Zur Laufzeit<br />
werden die Pläne weiterentwickelt und falls ein besserer Plan entsteht, ersetzt der neue Plan den<br />
alten. Somit entspricht das Planen einer Suche im Planraum. Beispiele von Planern die im Raum der<br />
Teilpläne operieren, sind der XFRM [BM94], [BAB + 01], der Partial Ordered Planner (POP) und der<br />
UCPOP [PW92].<br />
SAT-Planer basieren auf Propositional Satisfiability Methoden [Wel99]. Sie erhalten ein Planungsproblem<br />
als Eingabe und generieren eine logische Formel (propositional Formula), die, wenn erfüllt, die<br />
Existenz eines Planes beweist. Aus dem Beweis der Formel kann man einen Plan ermitteln, der das<br />
Planungsproblem löst. Einige Implementierungen vom SAT-Planer berücksichtigen auch Wahrscheinlichkeiten,<br />
um die Fehlerwahrscheinlichkeit einer Aktion in der Planung einzubeziehen [WN96]. Bekannte<br />
SAT-Planer sind Blackbox [KS98], GSAT [SLM92], WALKSAT [SKC96] und der Planer von<br />
Nasa’s Deep Space One [WN96], [MNPW98],<br />
Heuristische Planungsverfahren definieren Kosten für jeden Zustand, die den Abstand des Zustandes<br />
vom Zielzustand beschreiben, um dadurch die Graphsuche in die Richtung, die den meisten Erfolg<br />
verspricht, zu führen. Danach berechnen Heuristiken die Kosten für jeden Zustand und setzen einen<br />
hill-climbing, best-first oder A ∗ Algorithmus ein, um die Graphsuche zu beschleunigen. Heuristische<br />
Planungsverfahren, wie die HSP, HSPr und HSP2 Planer [BG01] oder GRT [RV03], können jedoch<br />
in lokale Minima führen oder finden nicht immer eine Lösung, auch wenn es eine gibt. Einen ähnlichen<br />
Ansatz verfolgen die Markov Decision Processes (MDP), die aber eine Suche im Planraum<br />
ausführen [DKKN93], [DB94]. Weiterhin können sie Erfolgswahrscheinlichkeiten für Aktionen bei<br />
der Planerstellung berücksichtigen.<br />
Die meisten der beschriebenen Verfahren aus dem Bereich der wissensbasierten Planung gehen davon<br />
aus, dass eine vollständige und konsistente Beschreibung der Umgebung vorliegt. Stimmt der eigent-<br />
(c)














