

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
76 4.1 Bildgestützte Zielführung<br />
4.1.1 Merkmalsextraktion<br />
Aus den Aufnahmen der Greiferkamera müssen Merkmale extrahiert werden, die die Lage des Zielobjektes<br />
im Bild beschreiben und dadurch die Aufnahmeposition eindeutig charakterisieren. Als besonders<br />
robust haben sich einfache Flächenmerkmale erwiesen, wie der Flächeninhalt, der Schwerpunkt,<br />
der umgebende Quader oder die Kompaktheit, da sie auf die Berechnung von Flächeninhalten basieren.<br />
Somit haben Segmentierungsfehler über die Summierung der Pixel einen kleineren Einfuß als bei<br />
der Extraktion einzelner Punkte 4 .<br />
Der Merkmalsvektor für die erste Ebene der Steuerungskomponente muss genügend Information über<br />
die relative Distanz zum Objekt beinhalten. Hier kommen Merkmale zum Einsatz, die die Fläche des<br />
roten, in Abbildung 4.3a schraffiert dargestellten Griffes 5 in der Aufnahme beschreiben, denn je näher<br />
die Greiferkamera dem Objekt kommt, desto größer erscheint dieses im Kamerabild. Zusätzlich wird<br />
der Schwerpunkt der Fläche im Bild bestimmt. Der Merkmalsvektor ist<br />
�sA = ( areasize, bordersize, height, width ), �uS = (uS, vS) (4.1)<br />
wobei areasize der Flächeninhalt des extrahierten Griffes in Pixel ist, bordersize die Peripherie der<br />
extrahierten Fläche, height und width die Höhe und Breite des umgebenden Quaders angeben und<br />
�uS dem Schwerpunkt der extrahierten Fläche im Bild entspricht.<br />
areasize<br />
bordersize<br />
¥¤¥¤¥¤¥¤¥ £¤£¤£¤£¤£<br />
£¤£¤£¤£¤£ ¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥ £¤£¤£¤£¤£<br />
£¤£¤£¤£¤£ ¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥ £¤£¤£¤£¤£<br />
£¤£¤£¤£¤£ ¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥ £¤£¤£¤£¤£<br />
£¤£¤£¤£¤£ ¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥ £¤£¤£¤£¤£<br />
width<br />
(a)<br />
height<br />
�§� �§�§�§�§�§� �§�§�§�§�§� ©§©§©<br />
¦§¦§¦§¦ ¨§¨§¨§¨�§�<br />
©§©§©<br />
�§� ©§©§© ¨§¨§¨§¨ ¦§¦§¦§¦<br />
¦§¦§¦§¦ ¨§¨§¨§¨�§�<br />
©§©§©<br />
�§� ©§©§© ¨§¨§¨§¨ ¦§¦§¦§¦<br />
¦§¦§¦§¦ ¨§¨§¨§¨�§�<br />
©§©§©<br />
�§� ©§©§© ¨§¨§¨§¨ ¦§¦§¦§¦<br />
¦§¦§¦§¦ ¨§¨§¨§¨�§�<br />
©§©§©<br />
�§� ©§©§© ¨§¨§¨§¨ ¦§¦§¦§¦<br />
cog3<br />
cog<br />
2<br />
areaside2<br />
cog<br />
1<br />
areaside 3<br />
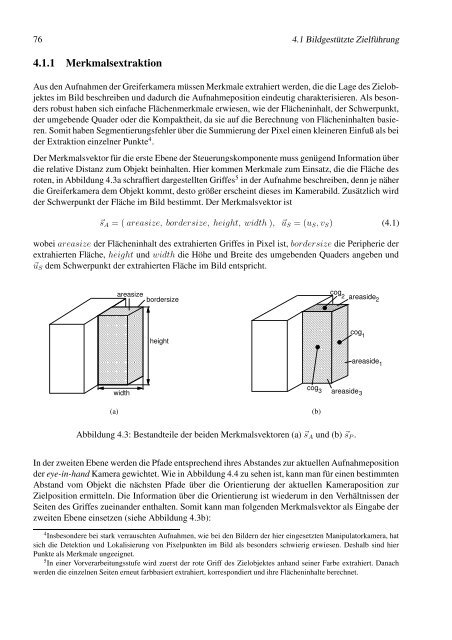
Abbildung 4.3: Bestandteile der beiden Merkmalsvektoren (a) �sA und (b) �sP .<br />
(b)<br />
areaside 1<br />
In der zweiten Ebene werden die Pfade entsprechend ihres Abstandes zur aktuellen Aufnahmeposition<br />
der eye-in-hand Kamera gewichtet. Wie in Abbildung 4.4 zu sehen ist, kann man für einen bestimmten<br />
Abstand vom Objekt die nächsten Pfade über die Orientierung der aktuellen Kameraposition zur<br />
Zielposition ermitteln. Die Information über die Orientierung ist wiederum in den Verhältnissen der<br />
Seiten des Griffes zueinander enthalten. Somit kann man folgenden Merkmalsvektor als Eingabe der<br />
zweiten Ebene einsetzen (siehe Abbildung 4.3b):<br />
4 Insbesondere bei stark verrauschten Aufnahmen, wie bei den Bildern der hier eingesetzten Manipulatorkamera, hat<br />
sich die Detektion und Lokalisierung von Pixelpunkten im Bild als besonders schwierig erwiesen. Deshalb sind hier<br />
Punkte als Merkmale ungeeignet.<br />
5 In einer Vorverarbeitungsstufe wird zuerst der rote Griff des Zielobjektes anhand seiner Farbe extrahiert. Danach<br />
werden die einzelnen Seiten erneut farbbasiert extrahiert, korrespondiert und ihre Flächeninhalte berechnet.














