

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
32 2.3 Verfahren zur Koordination reaktiver Verhalten<br />
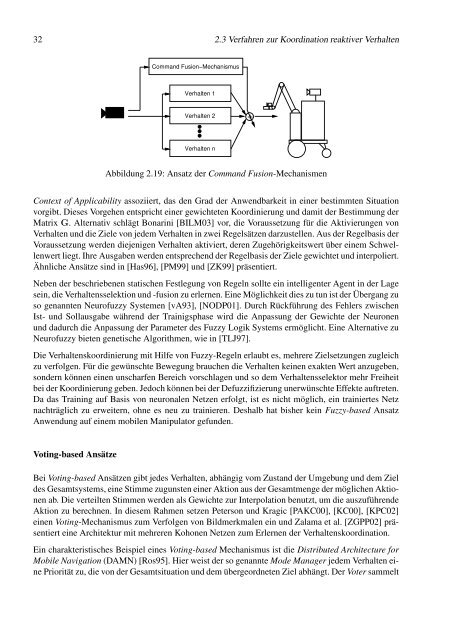
Command Fusion−Mechanismus<br />
Verhalten 1<br />
Verhalten 2<br />
Verhalten n<br />
Abbildung 2.19: Ansatz der Command Fusion-Mechanismen<br />
Context of Applicability assoziiert, das den Grad der Anwendbarkeit in einer bestimmten Situation<br />
vorgibt. Dieses Vorgehen entspricht einer gewichteten Koordinierung und damit der Bestimmung der<br />
Matrix G. Alternativ schlägt Bonarini [BILM03] vor, die Voraussetzung für die Aktivierungen von<br />
Verhalten und die Ziele von jedem Verhalten in zwei Regelsätzen darzustellen. Aus der Regelbasis der<br />
Voraussetzung werden diejenigen Verhalten aktiviert, deren Zugehörigkeitswert über einem Schwellenwert<br />
liegt. Ihre Ausgaben werden entsprechend der Regelbasis der Ziele gewichtet und interpoliert.<br />
Ähnliche Ansätze sind in [Has96], [PM99] und [ZK99] präsentiert.<br />
Neben der beschriebenen statischen Festlegung von Regeln sollte ein intelligenter Agent in der Lage<br />
sein, die Verhaltensselektion und -fusion zu erlernen. Eine Möglichkeit dies zu tun ist der Übergang zu<br />
so genannten Neurofuzzy Systemen [vA93], [NODP01]. Durch Rückführung des Fehlers zwischen<br />
Ist- und Sollausgabe während der Trainigsphase wird die Anpassung der Gewichte der Neuronen<br />
und dadurch die Anpassung der Parameter des Fuzzy Logik Systems ermöglicht. Eine Alternative zu<br />
Neurofuzzy bieten genetische Algorithmen, wie in [TLJ97].<br />
Die Verhaltenskoordinierung mit Hilfe von Fuzzy-Regeln erlaubt es, mehrere Zielsetzungen zugleich<br />
zu verfolgen. Für die gewünschte Bewegung brauchen die Verhalten keinen exakten Wert anzugeben,<br />
sondern können einen unscharfen Bereich vorschlagen und so dem Verhaltensselektor mehr Freiheit<br />
bei der Koordinierung geben. Jedoch können bei der Defuzzifizierung unerwünschte Effekte auftreten.<br />
Da das Training auf Basis von neuronalen Netzen erfolgt, ist es nicht möglich, ein trainiertes Netz<br />
nachträglich zu erweitern, ohne es neu zu trainieren. Deshalb hat bisher kein Fuzzy-based Ansatz<br />
Anwendung auf einem mobilen Manipulator gefunden.<br />
Voting-based Ansätze<br />
Bei Voting-based Ansätzen gibt jedes Verhalten, abhängig vom Zustand der Umgebung und dem Ziel<br />
des Gesamtsystems, eine Stimme zugunsten einer Aktion aus der Gesamtmenge der möglichen Aktionen<br />
ab. Die verteilten Stimmen werden als Gewichte zur Interpolation benutzt, um die auszuführende<br />
Aktion zu berechnen. In diesem Rahmen setzen Peterson und Kragic [PAKC00], [KC00], [KPC02]<br />
einen Voting-Mechanismus zum Verfolgen von Bildmerkmalen ein und Zalama et al. [ZGPP02] präsentiert<br />
eine Architektur mit mehreren Kohonen Netzen zum Erlernen der Verhaltenskoordination.<br />
Ein charakteristisches Beispiel eines Voting-based Mechanismus ist die Distributed Architecture for<br />
Mobile Navigation (DAMN) [Ros95]. Hier weist der so genannte Mode Manager jedem Verhalten eine<br />
Priorität zu, die von der Gesamtsituation und dem übergeordneten Ziel abhängt. Der Voter sammelt<br />
+














