

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6.2 High-Level Planer 131<br />
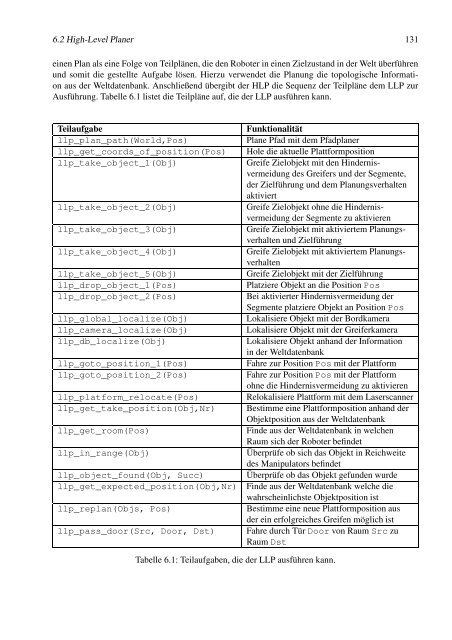
einen Plan als eine Folge von Teilplänen, die den Roboter in einen Zielzustand in der Welt überführen<br />
und somit die gestellte Aufgabe lösen. Hierzu verwendet die Planung die topologische Information<br />
aus der Weltdatenbank. Anschließend übergibt der HLP die Sequenz der Teilpläne dem LLP zur<br />
Ausführung. Tabelle 6.1 listet die Teilpläne auf, die der LLP ausführen kann.<br />
Teilaufgabe Funktionalität<br />
llp_plan_path(World,Pos) Plane Pfad mit dem Pfadplaner<br />
llp_get_coords_of_position(Pos) Hole die aktuelle Plattformposition<br />
llp_take_object_1(Obj) Greife Zielobjekt mit den Hindernisvermeidung<br />
des Greifers und der Segmente,<br />
der Zielführung und dem Planungsverhalten<br />
aktiviert<br />
llp_take_object_2(Obj) Greife Zielobjekt ohne die Hindernisvermeidung<br />
der Segmente zu aktivieren<br />
llp_take_object_3(Obj) Greife Zielobjekt mit aktiviertem Planungsverhalten<br />
und Zielführung<br />
llp_take_object_4(Obj) Greife Zielobjekt mit aktiviertem Planungsverhalten<br />
llp_take_object_5(Obj) Greife Zielobjekt mit der Zielführung<br />
llp_drop_object_1(Pos) Platziere Objekt an die Position Pos<br />
llp_drop_object_2(Pos) Bei aktivierter Hindernisvermeidung der<br />
Segmente platziere Objekt an Position Pos<br />
llp_global_localize(Obj) Lokalisiere Objekt mit der Bordkamera<br />
llp_camera_localize(Obj) Lokalisiere Objekt mit der Greiferkamera<br />
llp_db_localize(Obj) Lokalisiere Objekt anhand der Information<br />
in der Weltdatenbank<br />
llp_goto_position_1(Pos) Fahre zur Position Pos mit der Plattform<br />
llp_goto_position_2(Pos) Fahre zur Position Pos mit der Plattform<br />
ohne die Hindernisvermeidung zu aktivieren<br />
llp_platform_relocate(Pos) Relokalisiere Plattform mit dem Laserscanner<br />
llp_get_take_position(Obj,Nr) Bestimme eine Plattformposition anhand der<br />
Objektposition aus der Weltdatenbank<br />
llp_get_room(Pos) Finde aus der Weltdatenbank in welchen<br />
Raum sich der Roboter befindet<br />
llp_in_range(Obj) Überprüfe ob sich das Objekt in Reichweite<br />
des Manipulators befindet<br />
llp_object_found(Obj, Succ) Überprüfe ob das Objekt gefunden wurde<br />
llp_get_expected_position(Obj,Nr) Finde aus der Weltdatenbank welche die<br />
wahrscheinlichste Objektposition ist<br />
llp_replan(Objs, Pos) Bestimme eine neue Plattformposition aus<br />
der ein erfolgreiches Greifen möglich ist<br />
llp_pass_door(Src, Door, Dst) Fahre durch Tür Door von Raum Src zu<br />
Raum Dst<br />
Tabelle 6.1: Teilaufgaben, die der LLP ausführen kann.














