

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
140 6.6 ComControl<br />
Istposition<br />
Hindernis<br />
Hindernis<br />
8<br />
6<br />
Hindernis<br />
Objekt<br />
(a)<br />
4<br />
2<br />
φ 1<br />
NP<br />
−φ<br />
NP<br />
3<br />
5<br />
Neue Greifposition<br />
9<br />
7<br />
Istposition<br />
geplanter Pfad<br />
Hindernis<br />
Hindernis<br />
Objekt<br />
(b)<br />
Hindernis<br />
Greifposition<br />
virtuelles<br />
Hindernis<br />
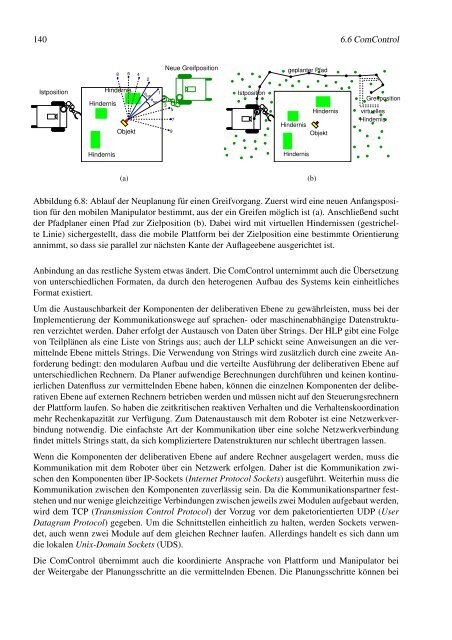
Abbildung 6.8: Ablauf der Neuplanung für einen Greifvorgang. Zuerst wird eine neuen Anfangsposition<br />
für den mobilen Manipulator bestimmt, aus der ein Greifen möglich ist (a). Anschließend sucht<br />
der Pfadplaner einen Pfad zur Zielposition (b). Dabei wird mit virtuellen Hindernissen (gestrichelte<br />
Linie) sichergestellt, dass die mobile Plattform bei der Zielposition eine bestimmte Orientierung<br />
annimmt, so dass sie parallel zur nächsten Kante der Auflageebene ausgerichtet ist.<br />
Anbindung an das restliche System etwas ändert. Die ComControl unternimmt auch die Übersetzung<br />
von unterschiedlichen Formaten, da durch den heterogenen Aufbau des Systems kein einheitliches<br />
Format existiert.<br />
Um die Austauschbarkeit der Komponenten der deliberativen Ebene zu gewährleisten, muss bei der<br />
Implementierung der Kommunikationswege auf sprachen- oder maschinenabhängige Datenstrukturen<br />
verzichtet werden. Daher erfolgt der Austausch von Daten über Strings. Der HLP gibt eine Folge<br />
von Teilplänen als eine Liste von Strings aus; auch der LLP schickt seine Anweisungen an die vermittelnde<br />
Ebene mittels Strings. Die Verwendung von Strings wird zusätzlich durch eine zweite Anforderung<br />
bedingt: den modularen Aufbau und die verteilte Ausführung der deliberativen Ebene auf<br />
unterschiedlichen Rechnern. Da Planer aufwendige Berechnungen durchführen und keinen kontinuierlichen<br />
Datenfluss zur vermittelnden Ebene haben, können die einzelnen Komponenten der deliberativen<br />
Ebene auf externen Rechnern betrieben werden und müssen nicht auf den Steuerungsrechnern<br />
der Plattform laufen. So haben die zeitkritischen reaktiven Verhalten und die Verhaltenskoordination<br />
mehr Rechenkapazität zur Verfügung. Zum Datenaustausch mit dem Roboter ist eine Netzwerkverbindung<br />
notwendig. Die einfachste Art der Kommunikation über eine solche Netzwerkverbindung<br />
findet mittels Strings statt, da sich kompliziertere Datenstrukturen nur schlecht übertragen lassen.<br />
Wenn die Komponenten der deliberativen Ebene auf andere Rechner ausgelagert werden, muss die<br />
Kommunikation mit dem Roboter über ein Netzwerk erfolgen. Daher ist die Kommunikation zwischen<br />
den Komponenten über IP-Sockets (Internet Protocol Sockets) ausgeführt. Weiterhin muss die<br />
Kommunikation zwischen den Komponenten zuverlässig sein. Da die Kommunikationspartner feststehen<br />
und nur wenige gleichzeitige Verbindungen zwischen jeweils zwei Modulen aufgebaut werden,<br />
wird dem TCP (Transmission Control Protocol) der Vorzug vor dem paketorientierten UDP (User<br />
Datagram Protocol) gegeben. Um die Schnittstellen einheitlich zu halten, werden Sockets verwendet,<br />
auch wenn zwei Module auf dem gleichen Rechner laufen. Allerdings handelt es sich dann um<br />
die lokalen Unix-Domain Sockets (UDS).<br />
Die ComControl übernimmt auch die koordinierte Ansprache von Plattform und Manipulator bei<br />
der Weitergabe der Planungsschritte an die vermittelnden Ebenen. Die Planungsschritte können bei














