

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3.2 Abgleich der Daten virtueller und realer Kameras 53<br />
Objekt<br />
Tisch<br />
Segment 3<br />
Greiferkamera<br />
Greifer<br />
Segment<br />
1<br />
Manipulator<br />
(a)<br />
Segment 2<br />
Rad 1<br />
Bordkamera<br />
mobile Plattform<br />
Rad 2<br />
Griff<br />
Umgebung<br />
Objekt Tisch mobile Plattform<br />
Basis Rad 1 Bordkamera Manipulator<br />
Greifer<br />
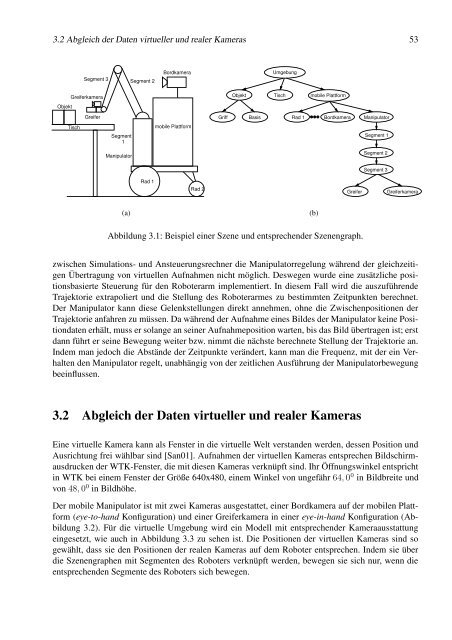
Abbildung 3.1: Beispiel einer Szene und entsprechender Szenengraph.<br />
(b)<br />
Segment 1<br />
Segment 2<br />
Segment 3<br />
Greiferkamera<br />
zwischen Simulations- und Ansteuerungsrechner die Manipulatorregelung während der gleichzeitigen<br />
Übertragung von virtuellen Aufnahmen nicht möglich. Deswegen wurde eine zusätzliche positionsbasierte<br />
Steuerung für den Roboterarm implementiert. In diesem Fall wird die auszuführende<br />
Trajektorie extrapoliert und die Stellung des Roboterarmes zu bestimmten Zeitpunkten berechnet.<br />
Der Manipulator kann diese Gelenkstellungen direkt annehmen, ohne die Zwischenpositionen der<br />
Trajektorie anfahren zu müssen. Da während der Aufnahme eines Bildes der Manipulator keine Positiondaten<br />
erhält, muss er solange an seiner Aufnahmeposition warten, bis das Bild übertragen ist; erst<br />
dann führt er seine Bewegung weiter bzw. nimmt die nächste berechnete Stellung der Trajektorie an.<br />
Indem man jedoch die Abstände der Zeitpunkte verändert, kann man die Frequenz, mit der ein Verhalten<br />
den Manipulator regelt, unabhängig von der zeitlichen Ausführung der Manipulatorbewegung<br />
beeinflussen.<br />
3.2 Abgleich der Daten virtueller und realer Kameras<br />
Eine virtuelle Kamera kann als Fenster in die virtuelle Welt verstanden werden, dessen Position und<br />
Ausrichtung frei wählbar sind [San01]. Aufnahmen der virtuellen Kameras entsprechen Bildschirmausdrucken<br />
der WTK-Fenster, die mit diesen Kameras verknüpft sind. Ihr Öffnungswinkel entspricht<br />
in WTK bei einem Fenster der Größe 640x480, einem Winkel von ungefähr 64, 0 0 in Bildbreite und<br />
von 48, 0 0 in Bildhöhe.<br />
Der mobile Manipulator ist mit zwei Kameras ausgestattet, einer Bordkamera auf der mobilen Plattform<br />
(eye-to-hand Konfiguration) und einer Greiferkamera in einer eye-in-hand Konfiguration (Abbildung<br />
3.2). Für die virtuelle Umgebung wird ein Modell mit entsprechender Kameraausstattung<br />
eingesetzt, wie auch in Abbildung 3.3 zu sehen ist. Die Positionen der virtuellen Kameras sind so<br />
gewählt, dass sie den Positionen der realen Kameras auf dem Roboter entsprechen. Indem sie über<br />
die Szenengraphen mit Segmenten des Roboters verknüpft werden, bewegen sie sich nur, wenn die<br />
entsprechenden Segmente des Roboters sich bewegen.














