

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
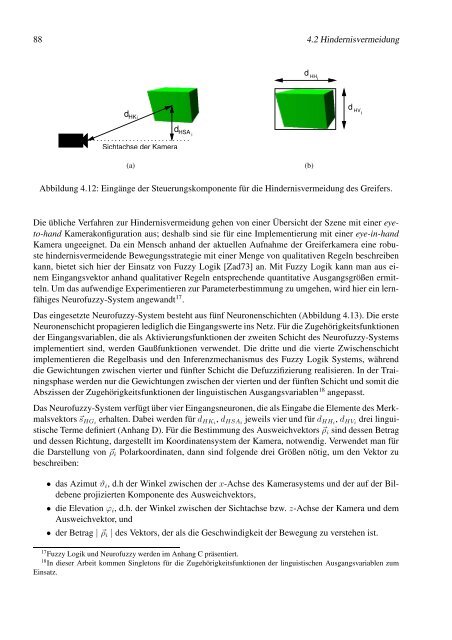
88 4.2 Hindernisvermeidung<br />
dHK i<br />
Sichtachse der Kamera<br />
(a)<br />
d<br />
HSA i<br />
Abbildung 4.12: Eingänge der Steuerungskomponente für die Hindernisvermeidung des Greifers.<br />
Die übliche Verfahren zur Hindernisvermeidung gehen von einer Übersicht der Szene mit einer eyeto-hand<br />
Kamerakonfiguration aus; deshalb sind sie für eine Implementierung mit einer eye-in-hand<br />
Kamera ungeeignet. Da ein Mensch anhand der aktuellen Aufnahme der Greiferkamera eine robuste<br />
hindernisvermeidende Bewegungsstrategie mit einer Menge von qualitativen Regeln beschreiben<br />
kann, bietet sich hier der Einsatz von Fuzzy Logik [Zad73] an. Mit Fuzzy Logik kann man aus einem<br />
Eingangsvektor anhand qualitativer Regeln entsprechende quantitative Ausgangsgrößen ermitteln.<br />
Um das aufwendige Experimentieren zur Parameterbestimmung zu umgehen, wird hier ein lernfähiges<br />
Neurofuzzy-System angewandt 17 .<br />
Das eingesetzte Neurofuzzy-System besteht aus fünf Neuronenschichten (Abbildung 4.13). Die erste<br />
Neuronenschicht propagieren lediglich die Eingangswerte ins Netz. Für die Zugehörigkeitsfunktionen<br />
der Eingangsvariablen, die als Aktivierungsfunktionen der zweiten Schicht des Neurofuzzy-Systems<br />
implementiert sind, werden Gaußfunktionen verwendet. Die dritte und die vierte Zwischenschicht<br />
implementieren die Regelbasis und den Inferenzmechanismus des Fuzzy Logik Systems, während<br />
die Gewichtungen zwischen vierter und fünfter Schicht die Defuzzifizierung realisieren. In der Trainingsphase<br />
werden nur die Gewichtungen zwischen der vierten und der fünften Schicht und somit die<br />
Abszissen der Zugehörigkeitsfunktionen der linguistischen Ausgangsvariablen 18 angepasst.<br />
Das Neurofuzzy-System verfügt über vier Eingangsneuronen, die als Eingabe die Elemente des Merkmalsvektors<br />
�sHGi erhalten. Dabei werden für dHKi , dHSAi jeweils vier und für dHHi , dHVi drei linguistische<br />
Terme definiert (Anhang D). Für die Bestimmung des Ausweichvektors �ρi sind dessen Betrag<br />
und dessen Richtung, dargestellt im Koordinatensystem der Kamera, notwendig. Verwendet man für<br />
die Darstellung von �ρi Polarkoordinaten, dann sind folgende drei Größen nötig, um den Vektor zu<br />
beschreiben:<br />
• das Azimut ϑi, d.h der Winkel zwischen der x-Achse des Kamerasystems und der auf der Bildebene<br />
projizierten Komponente des Ausweichvektors,<br />
• die Elevation ϕi, d.h. der Winkel zwischen der Sichtachse bzw. z-Achse der Kamera und dem<br />
Ausweichvektor, und<br />
d HH<br />
i<br />
• der Betrag | �ρi | des Vektors, der als die Geschwindigkeit der Bewegung zu verstehen ist.<br />
17 Fuzzy Logik und Neurofuzzy werden im Anhang C präsentiert.<br />
18 In dieser Arbeit kommen Singletons für die Zugehörigkeitsfunktionen der linguistischen Ausgangsvariablen zum<br />
Einsatz.<br />
(b)<br />
d HV<br />
i














