

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2.3 Verfahren zur Koordination reaktiver Verhalten 31<br />
2.3.2 Das Command Fusion-Prinzip<br />
Command Fusion-Algorithmen interpolieren die Ausgaben aller aktiven Verhalten, um die resultierende<br />
Aktion zu bestimmen (Abbildung 2.19). Dabei machen sie von den Sensordaten und bekannten<br />
oder erlernten Kenntnissen über die Wirksamkeit des Verhalten in bestimmten Situationen Gebrauch.<br />
Die Gewichtungsmatrix G enthält hier mehrere von Null verschiedene Elemente. Pirjanian [Pir99]<br />
unterscheidet zwischen Fuzzy-based, Voting-based und Superposition-based Systemen, die in den<br />
folgenden Unterabschnitten dargestellt sind.<br />
Command Fusion-Mechanismen haben gegenüber dem Arbitration-Prinzip den Vorteil, dass sie Verhalten,<br />
die kritisch für die Sicherheit des Roboters sind, zugleich anwenden können. So ist beispielsweise<br />
ein schnelles Erreichen des Zielobjektes mit gleichzeitiger Hindernisvermeidung des Greifers<br />
und der Segmente möglich. Command Fusion-Mechanismen sind weiterhin weniger anfällig auf<br />
Deadlock-Situationen als die auf Arbitration basierende Ansätze. Sie ermöglichen auch das einfachere<br />
Implementieren von Roboterverhalten, da komplexe Fertigkeiten in mehreren Komponenten<br />
zerlegt werden können, deren Ausgaben über den Koordinationsmechanismus fusioniert werden. Insgesamt<br />
produzieren sie glattere Robotertrajektorien und dadurch weniger Belastung für die Mechanik,<br />
da kein Umschalten zwischen sich oft wiedersprechenden Verhalten sondern eine gewichtete<br />
Fusion der Ausgaben stattfindet. Der Nachteil der Command Fusion-Prinzips liegt hauptsächlich bei<br />
der Realisierung des Fusions-Mechanismus, der ein langwieriges Experimentieren erfordert, um die<br />
geeigneten Gewichtungen für Matrix G je nach Situation zu bestimmen. Wird zusätzlich ein neues<br />
Verhalten im System eingeführt, dann muss dieser Vorgang meistens erneut ausgeführt werden.<br />
Fuzzy Logik<br />
In der mobilen Robotik wurde der Einsatz von Fuzzy Logik eingehend untersucht. Oft sind Verhalten<br />
einer mobilen Plattform mit Hilfe von Fuzzy Logik realisiert, wie in [Pau98] oder [ACH97]. Bei<br />
Aycard [ACH97] wird für jedes Verhalten des mobilen Roboters eine Regelbasis aufgestellt. Nach<br />
der parallelen Defuzzifizierung aller Verhalten ergeben sich die von jeder Fertigkeit vorgeschlagenen<br />
Aktionen. In einer zweiten Phase wählt das System eine auszuführende globale Aktion als das arithmetische<br />
Mittel aller Aktionen aus. Pirjanian [PM99] zeigt, dass es Situationen gibt, in denen dieser<br />
einfache Mechanismus zu unerwünschten Bewegungen führt, weil es zu einem Konflikt zwischen<br />
Verhalten mit unterschiedlichen Zielsetzungen kommt. Daher schlägt Saffiotti [SKR95], [Saf97] in<br />
der Multi-Valued Architektur für die Ansteuerung einer mobilen Plattform ein so genanntes Contextdependent<br />
Blending vor. Hierbei werden die Fuzzy Ausgaben der einzelnen Verhalten mit Fuzzy Metaregeln<br />
gewichtet und anschließend defuzzifiziert. Dadurch wird jedes Verhalten mit seinem eigenen<br />
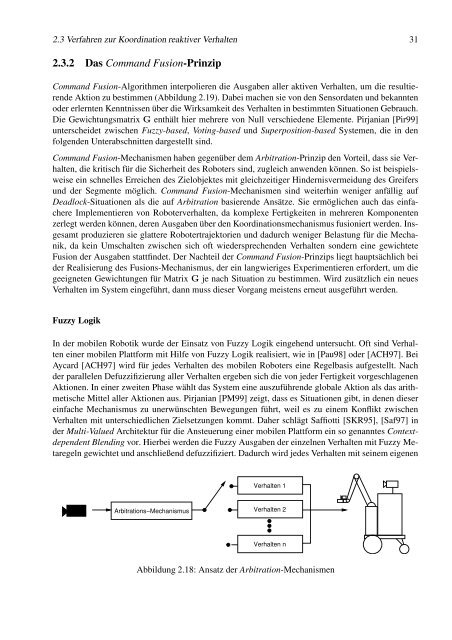
Arbitrations−Mechanismus<br />
Verhalten 1<br />
Verhalten 2<br />
Verhalten n<br />
Abbildung 2.18: Ansatz der Arbitration-Mechanismen














