

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
In other words, roundoff errors may badly affect the length of the solution w, but not its direction.<br />
Practice: If, in the course of Gaussian elimination/LU-factorization a zero pivot element is really encountered,<br />
then we just replace it with eps, in order to avoid inf values!<br />
Thm. 5.3.2 ➣ Convergence of shifted inverse iteration for A H = A:<br />
Asymptotic linear convergence, Rayleigh quotient → λ j with rate<br />
|λ j − α|<br />
min{|λ i − α|, i ≠ j} with λ j ∈ σ(A) , |α − λ j | ≤ |α − λ| ∀λ ∈ σ(A) .<br />
Idea:<br />
Extremely fast for α ≈ λ j !<br />
Algorithm 5.3.16 (Rayleigh quotient iteration).<br />
Rayleigh<br />
quotient<br />
iteration<br />
(for normal A ∈ K n,n )<br />
preserves sparsity,<br />
Sect. 2.6.2<br />
see<br />
A posteriori adaptation of shift<br />
Use α := ρ A (z (k−1) ) in k-th step of inverse iteration.<br />
MATLAB-CODE : Rayleigh quotient iteration<br />
function [z,lmin] = rqui(A,tol,maxit)<br />
alpha = 0; n = size(A,1);<br />
z = rand(size(A,1),1); z = z/norm(z);<br />
for i=1:maxit<br />
z = (A-alpha*speye(n))\z;<br />
z = z/norm(z); lmin=dot(A*z,z);<br />
if (abs(alpha-lmin) < tol), break; end;<br />
alpha = lmin;<br />
end<br />
△<br />
(5.3.17)<br />
Ôº½ º¿<br />
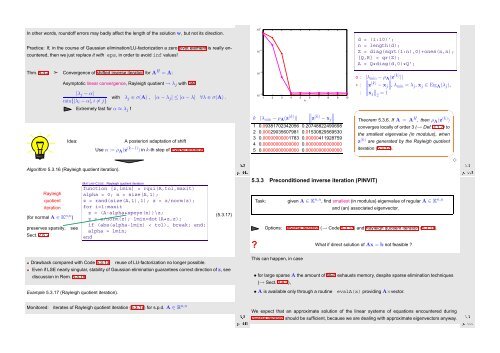
10 −5<br />
10 −10<br />
10 −15<br />
1 2 3 4 5 6 7 8 9 10<br />
10 0 k<br />
k |λ min − ρ A (z (k) )|<br />
∥<br />
∥z (k) − x j<br />
∥ ∥∥<br />
1 0.09381702342056 0.20748822490698<br />
2 0.00029035607981 0.01530829569530<br />
3 0.00000000001783 0.00000411928759<br />
4 0.00000000000000 0.00000000000000<br />
5 0.00000000000000 0.00000000000000<br />
d = (1:10)’;<br />
n = length(d);<br />
Z = diag(sqrt(1:n),0)+ones(n,n);<br />
[Q,R] = qr(Z);<br />
A = Q*diag(d,0)*Q’;<br />
o : |λ min − ρ A ∥(z (k) )|<br />
∥<br />
∗ : ∥z (k) ∥∥,<br />
− x j λmin = λ j , x j ∈ Eig A (λ j ),<br />
∥ ∥<br />
: ∥x ∥2 j = 1<br />
✬<br />
Theorem 5.3.6. If A = A H , then ρ A (z (k) )<br />
converges locally of order 3 (→ Def. 3.1.7) to<br />
the smallest eigenvalue (in modulus), when<br />
z (k) are generated by the Rayleigh quotient<br />
iteration (5.3.17).<br />
✫<br />
5.3.3 Preconditioned inverse iteration (PINVIT)<br />
Task:<br />
given A ∈ K n,n , find smallest (in modulus) eigenvalue of regular A ∈ K n,n<br />
and (an) associated eigenvector.<br />
Options: inverse iteration (→ Code 5.3.13) and Rayleigh quotient iteration (5.3.17).<br />
? What if direct solution of Ax = b not feasible ?<br />
✩<br />
Ôº¿ º¿<br />
✪<br />
✸<br />
Drawback compared with Code 5.3.13: reuse of LU-factorization no longer possible.<br />
Even if LSE nearly singular, stability of Gaussian elimination guarantees correct direction of z, see<br />
discussion in Rem. 5.3.15.<br />
This can happen, in case<br />
• for large sparse A the amount of fill-in exhausts memory, despite sparse elimination techniques<br />
(→ Sect. 2.6.3),<br />
Example 5.3.17 (Rayleigh quotient iteration).<br />
• A is available only through a routine<br />
evalA(x) providing A×vector.<br />
Monitored:<br />
iterates of Rayleigh quotient iteration (5.3.17) for s.p.d. A ∈ R n,n<br />
Ôº¾ º¿<br />
We expect that an approximate solution of the linear systems of equations encountered during<br />
inverse iteration should be sufficient, because we are dealing with approximate eigenvectors anyway.<br />
Ôº º¿













