

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
x 2<br />
a<br />
.<br />
x 1<br />
Q =<br />
x 2<br />
( ) cosϕ sinϕ<br />
− sinϕ cosϕ<br />
a<br />
ϕ x<br />
. 1<br />
• Practice: for the sake of numerical stability (in order to avoid so-called cancellation) choose<br />
{ 12 (a + ‖a‖<br />
v =<br />
2 e 1 ) , if a 1 > 0 ,<br />
1<br />
2 (a − ‖a‖ 2 e 1) , if a 1 ≤ 0 .<br />
However, this is not really needed [24, Sect. 19.1] !<br />
• If K = C and a 1 = |a 1 | exp(iϕ), ϕ ∈ [0, 2π[, then choose<br />
v = 1 2 (a ± ‖a‖ 2 e 1 exp(−iϕ)) in (2.8.2).<br />
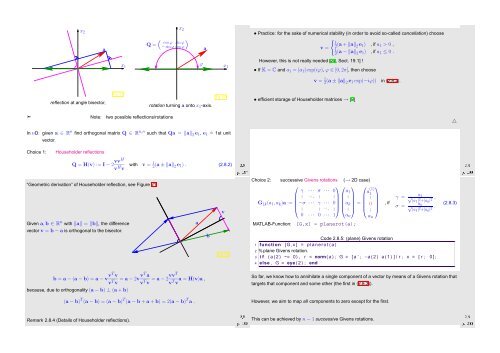
reflection at angle bisector,<br />
Fig. 21<br />
rotation turning a onto x 1 -axis.<br />
Fig. 22<br />
• efficient storage of Householder matrices → [2]<br />
➣ Note: two possible reflections/rotations<br />
△<br />
In nD: given a ∈ R n find orthogonal matrix Q ∈ R n,n such that Qa = ‖a‖ 2 e 1 , e 1 ˆ= 1st unit<br />
Choice 1:<br />
vector.<br />
Householder reflections<br />
Q = H(v) := I − 2 vvH<br />
v H v with v = 1 2 (a ± ‖a‖ 2 e 1) . (2.8.2)<br />
Ôº½<br />
¾º<br />
Ôº½ ¾º<br />
“Geometric derivation” of Householder reflection, see Figure 21<br />
Given a,b ∈ R n with ‖a‖ = ‖b‖, the difference<br />
vector v = b − a is orthogonal to the bisector.<br />
a<br />
b<br />
v<br />
Fig. 23<br />
Choice 2: successive Givens rotations (→ 2D case)<br />
⎛<br />
⎞⎛<br />
⎞ ⎛<br />
¯γ · · · ¯σ · · · 0 a 1 a (1) ⎞<br />
. ... . .<br />
.<br />
1 G 1k (a 1 , a k )a :=<br />
⎜−σ · · · γ · · · 0<br />
⎟⎜a k<br />
⎟<br />
⎝ . . . .. . ⎠⎝<br />
. ⎠ = .<br />
γ =<br />
⎜ ⎟<br />
⎝<br />
0. ⎠ , if σ =<br />
0 · · · 0 · · · 1 a n a n<br />
MATLAB-Function:<br />
[G,x] = planerot(a);<br />
a 1 √|a1<br />
| 2 +|a k | 2 ,<br />
√|a1<br />
a k<br />
| 2 +|a k | . (2.8.3)<br />
2<br />
Code 2.8.5: (plane) Givens rotation<br />
1 function [G, x ] = p l a n e r o t ( a )<br />
2 % plane Givens rotation.<br />
3 i f ( a ( 2 ) ~= 0) , r = norm( a ) ; G = [ a ’ ; −a ( 2 ) a ( 1 ) ] / r ; x = [ r ; 0 ] ;<br />
4 else , G = eye ( 2 ) ; end<br />
b = a − (a − b) = a − v vT v<br />
v T v = a − 2vvT a<br />
v T v = a − 2vvT v T v a = H(v)a ,<br />
because, due to orthogonality (a − b) ⊥ (a + b)<br />
So far, we know how to annihilate a single component of a vector by means of a Givens rotation that<br />
targets that component and some other (the first in (2.8.3)).<br />
(a − b) T (a − b) = (a − b) T (a − b + a + b) = 2(a − b) T a .<br />
Remark 2.8.4 (Details of Householder reflections).<br />
Ôº½ ¾º<br />
However, we aim to map all components to zero except for the first.<br />
This can be achieved by n − 1 successive Givens rotations.<br />
Ôº¾¼¼ ¾º













