

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
△<br />
Example 7.5.2 (Linear regression for stationary Markov chains).<br />
Sequence of scalar random variables: (Y k ) k∈Z = Markov chain<br />
Assume:<br />
stationary (time-independent) correlation<br />
Expectation E(Y i−j Y i−k ) = u k−j ∀i,j,k ∈ Z , u i = u −i .<br />
7.5 Toeplitz matrix techniques<br />
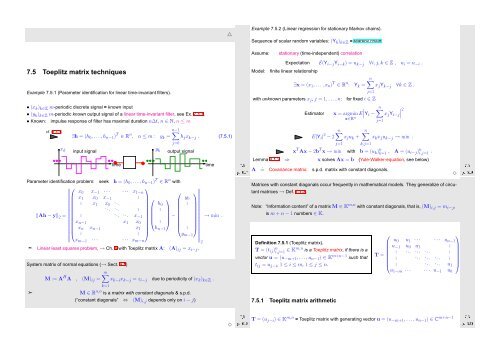
Example 7.5.1 (Parameter identification for linear time-invariant filters).<br />
Model:<br />
finite linear relationship<br />
∃x = (x 1 ,...,x n ) T ∈ R n : Y k =<br />
with unknown parameters x j , j = 1, . ..,n:<br />
n∑<br />
x j Y k−j ∀k ∈ Z .<br />
j=1<br />
for fixed i ∈ Z<br />
• (x k ) k∈Z m-periodic discrete signal = known input<br />
• (y k ) k∈Z m-periodic known output signal of a linear time-invariant filter, see Ex. 7.1.1.<br />
• Known: impulse response of filter has maximal duration n∆t, n ∈ N, n ≤ m<br />
Estimator<br />
∣<br />
n∑ ∣ ∣∣ 2<br />
x = argmin E∣Y i − x j Y i−j<br />
x∈R n j=1<br />
cf. (7.1.1)<br />
n−1<br />
∃h = (h 0 ,...,h n−1 ) T ∈ R n ∑<br />
, n ≤ m : y k = h j x k−j . (7.5.1)<br />
x k input signal<br />
y k output signal<br />
time<br />
time<br />
j=0<br />
Ôº½ º<br />
E|Y i | 2 − 2<br />
n∑<br />
x j u k +<br />
j=1<br />
n∑<br />
x k x j u k−j → min .<br />
k,j=1<br />
x T Ax − 2b T x → min with b = (u k ) n k=1 , A = (u i−j) n i,j=1 .<br />
Lemma 4.1.2 ⇒ x solves Ax = b (Yule-Walker-equation, see below)<br />
A ˆ= Covariance matrix:<br />
s.p.d. matrix with constant diagonals.<br />
Ôº½ º<br />
✸<br />
Parameter identification problem: seek h = (h 0 ,...,h n−1 ) T ∈ R n with<br />
⎛<br />
⎞<br />
x 0 x −1 · · · · · · x 1−n ⎛ ⎞<br />
x 1 x 0 x −1 .<br />
. x 1 x . ⎛ ⎞ y 0<br />
0<br />
..<br />
h ... . 0<br />
.<br />
.. .<br />
‖Ah − y‖ 2 =<br />
. . .. . .<br />
.. x −1<br />
x n−1 x 1 x ⎜ ⎟<br />
0<br />
⎝ . ⎠ − → min .<br />
⎜ x n x n−1 x ⎜ ⎟<br />
1 ⎟ h n−1 ⎝ . ⎠<br />
⎝<br />
.<br />
. ⎠ y m−1 ∥ x m−1 · · · · · · x ∥ m−n 2<br />
➣ Linear least squares problem, → Ch. 6 with Toeplitz matrix A: (A) ij = x i−j .<br />
System matrix of normal equations (→ Sect. 6.1)<br />
m∑<br />
M := A H A , (M) ij = x k−i x k−j = z i−j due to periodicity of (x k ) k∈Z .<br />
k=1<br />
➣<br />
M ∈ R n,n is a matrix with constant diagonals & s.p.d.<br />
(“constant diagonals” ⇔ (M) i,j depends only on i − j)<br />
Ôº½ º<br />
✸<br />
Matrices with constant diagonals occur frequently in mathematical models. They generalize of circulant<br />
matrices → Def. 7.1.3.<br />
Note: “Information content” of a matrix M ∈ K m,n with constant diagonals, that is, (M) i,j = m i−j ,<br />
is m + n − 1 numbers ∈ K.<br />
Definition 7.5.1 (Toeplitz matrix).<br />
T = (t ij ) n i,j=1 ∈ Km,n is a Toeplitz matrix, if there is a<br />
vector u = (u −m+1 ,...,u n−1 ) ∈ K m+n−1 such that<br />
t ij = u j−i , 1 ≤ i ≤ m, 1 ≤ j ≤ n.<br />
7.5.1 Toeplitz matrix arithmetic<br />
⎛<br />
⎞<br />
u 0 u 1 · · · · · · u n−1<br />
u −1 u 0 u 1 .<br />
T =<br />
. . .. ... . .. .<br />
⎜ . ... . .. ... .<br />
⎝ . .<br />
⎟<br />
.. ... u 1 ⎠<br />
u 1−m · · · · · · u −1 u 0<br />
T = (u j−i ) ∈ K m,n = Toeplitz matrix with generating vector u = (u −m+1 ,...,u n−1 ) ∈ C m+n−1<br />
Ôº¾¼ º













