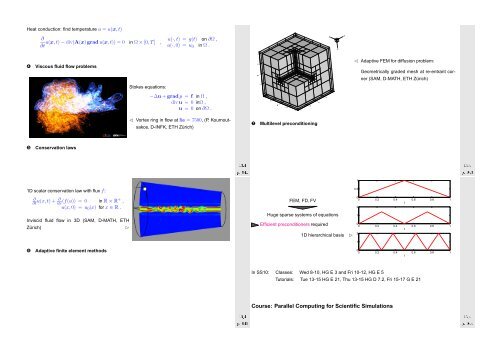
Z Heat conduction: find temperature u = u(x, t) ∂ ∂t u(x, t) − div(A(x)grad u(x, t)) = 0 in Ω × [0, T] , u(·, t) = g(t) on ∂Ω , u(·, 0) = u 0 in Ω . X Z Y 1 ➍ Viscous fluid flow problems 0.5 0 ✁ Adaptive FEM for diffusion problem: Geometrically graded mesh at re-entrant corner (<strong>SAM</strong>, D-MATH, ETH Zürich) Stokes equations: 0.5 −∆u + gradp = f in Ω , divu = 0 inΩ , u = 0 on ∂Ω . 1 1 0.5 X 0 0.5 1 1 0.5 0 Y 0.5 1 ✁ Vortex ring in flow at Re = 7500, (P. Koumoutsakos, D-INFK, ETH Zürich) ➐ Multilevel preconditioning ➎ Conservation laws Ôº½ ½¿º Ôº¿ ½¿º 1 1D scalar conservation law with flux f: ∂ ∂t u(x,t) + ∂x ∂ (f(u)) = 0 in R × R+ , u(x, 0) = u 0 (x) for x ∈ R . Inviscid fluid flow in 3D (<strong>SAM</strong>, D-MATH, ETH Zürich) ✄ FEM, FD, FV Huge sparse systems of equations Efficient preconditioners required 1D hierarchical basis ✄ 0.5 0 0 0.2 0.4 0.6 0.8 1 t 2 1 0 0 0.2 0.4 0.6 0.8 1 t 2 1 ➏ Adaptive finite element methods 0 0 0.2 0.4 0.6 0.8 1 t In SS10: Classes: Wed 8-10, HG E 3 and Fri 10-12, HG E 5 Tutorials: Tue 13-15 HG E 21, Thu 13-15 HG D 7.2, Fri 15-17 G E 21 Ôº¾ ½¿º Course: Parallel Computing for Scientific Simulations Ôº ½¿º
[18] G. GOLUB AND C. VAN LOAN, Matrix computations, John Hopkins University Press, Baltimore, London, 2nd ed., 1989. [19] C. GRAY, An analysis of the Belousov-Zhabotinski reaction, Rose-Hulman Undergraduate Math Journal, 3 (2002). http://www.rose-hulman.edu/mathjournal/archives/2002/vol3-n1/paper1/v3n1- 1pd.pdf. Bibliography [20] W. HACKBUSCH, Iterative Lösung großer linearer Gleichungssysteme, B.G. Teubner–Verlag, Stuttgart, 1991. [21] E. HAIRER, C. LUBICH, AND G. WANNER, Geometric numerical integration, vol. 31 of Springer [1] H. AMANN, Gewöhnliche Differentialgleichungen, Walter de Gruyter, Berlin, 1st ed., 1983. [2] C. BISCHOF AND C. VAN LOAN, The WY representation of Householder matrices, SIAM J. Sci. Stat. Comput., 8 (1987). Series in Computational Mathematics, Springer, Heidelberg, 2002. [22] C. HALL AND W. MEYER, Optimal error bounds for cubic spline interpolation, J. Approx. Theory, 16 (1976), pp. 105–122. [3] F. BORNEMANN, A model for understanding numerical stability, IMA J. Numer. Anal., 27 (2006), pp. 219–231. [23] M. HANKE-BOURGEOIS, Grundlagen der Numerischen Mathematik und des Wissenschaftlichen Rechnens, Mathematische Leitfäden, B.G. Teubner, Stuttgart, 2002. [4] E. BRIGHAM, The Fast Fourier Transform and Its Applications, Prentice-Hall, Englewood Cliffs, [24] N. HIGHAM, Accuracy and Stability of <strong>Numerical</strong> Algorithms, SIAM, Philadelphia, PA, 2 ed., 2002. NJ, 1988. [25] M. KOWARSCHIK AND W. C, An overview of cache optimization techniques and cache-aware nu- [5] Q. CHEN AND I. BABUSKA, Approximate optimal points for polynomial interpolation of real functions in an interval and in a triangle, Comp. Meth. Appl. Mech. Engr., 128 (1995), pp. 405–417. [6] D. COPPERSMITH AND T. RIVLIN, The growth of polynomials bounded at equally spaced points, SIAM J. Math. Anal., 23 (1992), pp. 970–983. Ôº ½¿º merical algorithms, in Algorithms for Memory Hierarchies, vol. 2625 of Lecture Notes in Computer Science, Springer, Heidelberg, 2003, pp. 213–232. [26] D. MCALLISTER AND J. ROULIER, An algorithm for computing a shape-preserving osculatory quadratic spline, ACM Trans. Math. Software, 7 (1981), pp. 331–347. Ôº ½¿º [7] D. COPPERSMITH AND S. WINOGRAD, Matrix multiplication via arithmetic progression, J. Symb- [27] C. MOLER, <strong>Numerical</strong> Computing with MATLAB, SIAM, Philadelphia, PA, 2004. golic Computing, 9 (1990), pp. 251–280. [28] K. NEYMEYR, A geometric theory for preconditioned inverse iteration applied to a subspace, [8] W. DAHMEN AND A. REUSKEN, Numerik für Ingenieure und Naturwissenschaftler, Springer, Hei- Tech. Rep. 130, SFB 382, Universität Tübingen, Tübingen, Germany, November 1999. Submitted delberg, 2006. to Math. Comp. [9] P. DAVIS, Interpolation and Approximation, Dover, New York, 1975. [29] , A geometric theory for preconditioned inverse iteration: III. Sharp convergence estimates, [10] M. DEAKIN, Applied catastrophe theory in the social and biological sciences, Bulletin of Mathe- Tech. Rep. 130, SFB 382, Universität Tübingen, Tübingen, Germany, November 1999. matical Biology, 42 (1980), pp. 647–679. [30] M. OVERTON, <strong>Numerical</strong> Computing with IEEE Floating Point Arithmetic, SIAM, Philadelphia, PA, [11] P. DEUFLHARD, Newton <strong>Methods</strong> for Nonlinear Problems, vol. 35 of Springer Series in Computa- 2001. tional Mathematics, Springer, Berlin, 2004. [31] A. D. H.-D. QI, L.-Q. QI, AND H.-X. YIN, Convergence of Newton’s method for convex best [12] P. DEUFLHARD AND F. BORNEMANN, Numerische Mathematik II, DeGruyter, Berlin, 2 ed., 2002. interpolation, Numer. Math., 87 (2001), pp. 435–456. [13] P. DEUFLHARD AND A. HOHMANN, Numerische Mathematik I, DeGruyter, Berlin, 3 ed., 2002. [32] A. QUARTERONI, R. SACCO, AND F. SALERI, <strong>Numerical</strong> mathematics, vol. 37 of Texts in Applied [14] P. DUHAMEL AND M. VETTERLI, Fast fourier transforms: a tutorial review and a state of the art, Mathematics, Springer, New York, 2000. Signal Processing, 19 (1990), pp. 259–299. [33] C. RADER, Discrete Fourier transforms when the number of data samples is prime, Proceedings [15] F. FRITSCH AND R. CARLSON, Monotone piecewise cubic interpolation, SIAM J. Numer. Anal., of the IEEE, 56 (1968), pp. 1107–1108. 17 (1980), pp. 238–246. [34] R. RANNACHER, Einführung in die numerische mathematik. Vorlesungsskriptum Universität Hei- [16] M. GANDER, W. GANDER, G. GOLUB, AND D. GRUNTZ, Scientific Computing: An introduction using MATLAB, Springer, 2005. In Vorbereitung. [17] J. GILBERT, C.MOLER, AND R. SCHREIBER, Sparse matrices in MATLAB: Design and implemen- Ôº ½¿º delberg, 2000. http://gaia.iwr.uni-heidelberg.de/. [35] T. SAUER, <strong>Numerical</strong> analysis, Addison Wesley, Boston, 2006. [36] J.-B. SHI AND J. MALIK, Normalized cuts and image segmentation, IEEE Trans. Pattern Analysis Ôº ½¿º tation, SIAM Journal on Matrix Analysis and Applications, 13 (1992), pp. 333–356. and Machine Intelligence, 22 (2000), pp. 888–905.
- Page 1 and 2:
2 Direct Methods for Linear Systems
- Page 3 and 4:
III Integration of Ordinary Differe
- Page 5 and 6:
Extra questions for course evaluati
- Page 7 and 8:
1.1.2 Matrices Matrices = two-dimen
- Page 9 and 10:
Remark 1.2.1 (Row-wise & column-wis
- Page 11 and 12:
1.3 Complexity/computational effort
- Page 13 and 14:
Syntax of BLAS calls: The functions
- Page 15 and 16:
4 { 5 a ssert ( this−>n==B. n &&
- Page 17 and 18:
34 long r t 0 ; 35 bool bStarted ;
- Page 19 and 20:
Obviously, left multiplication with
- Page 21 and 22:
❶: elimination step, ❷: backsub
- Page 23 and 24:
A direct way to LU-decomposition:
- Page 25 and 26:
Solution of LŨx = b: x ( ) 2ǫ = 1
- Page 27 and 28:
numerically equivalent ˆ= same res
- Page 29 and 30:
Code 2.4.8: Finding outeps in MATLA
- Page 31 and 32:
Terminology: Def. 2.5.5 introduces
- Page 33 and 34:
Example 2.5.5 (Instability of multi
- Page 35 and 36:
Note: sensitivity gauge depends on
- Page 37 and 38:
6 for i =1:20 7 n = 2^ i ; m = n /
- Page 39 and 40:
0 20 40 60 80 100 120 140 160 180 2
- Page 41 and 42:
Use sparse matrix format: 10 1 10 2
- Page 43 and 44:
Envelope-aware LU-factorization: 0
- Page 45 and 46:
0 20 40 60 80 100 0 20 0 20 0 20 De
- Page 47 and 48:
Evident: symmetry of à − bbT a 1
- Page 49 and 50:
9 ylabel ( ’ { \ b f c o n d i t
- Page 51 and 52:
Mapping a ∈ K n to a multiple of
- Page 53 and 54:
Then store G ij (a,b) as triple (i,
- Page 55 and 56:
Recall: e i ˆ= i-th unit vector Ch
- Page 57 and 58:
Computation of Choleskyfactorizatio
- Page 59 and 60:
1 ∃ (partial) cyclic row permutat
- Page 61 and 62:
Definition 3.1.3 (Local and global
- Page 63 and 64:
Example 3.1.6 (quadratic convergenc
- Page 65 and 66:
k |x (k) − π| L 1−L |x (k) −
- Page 67 and 68:
(x (k) ) k∈N0 Cauchy sequence ➤
- Page 69 and 70:
Termination criterion for contracti
- Page 71 and 72:
Given x (k) ∈ I, next iterate :=
- Page 73 and 74:
secant method ( MATLAB implementati
- Page 75 and 76:
Assuming p = 1: p > 1: ∥ C ∥e (
- Page 77 and 78:
This is a simple computation: DG(x)
- Page 79 and 80:
k x (k) ǫ k := ‖x ∗ − x (k)
- Page 81 and 82:
Code 3.4.14: Damped Newton method (
- Page 83 and 84:
MATLAB-CODE: Broyden method (3.4.11
- Page 85 and 86:
Algorithm 4.1.3 (Steepest descent).
- Page 87 and 88:
Example 4.1.8 (Convergence of gradi
- Page 89 and 90:
4.2.1 Krylov spaces Definition 4.2.
- Page 91 and 92:
Remark 4.2.3 (A posteriori terminat
- Page 93 and 94:
10 figure ; view ([ −45 ,28]) ; m
- Page 95 and 96:
Idea: Solve Ax = b approximately in
- Page 97 and 98:
eplaced with κ(A) ! 4.4.2 Iteratio
- Page 99 and 100:
For circuit of Fig. 55 at angular f
- Page 101 and 102:
(Linear) generalized eigenvalue pro
- Page 103 and 104:
10 0 10 1 matrix size n d = eig(A)
- Page 105 and 106:
0 50 100 150 200 250 300 350 400 45
- Page 107 and 108:
1 2 3 k ρ (k) EV ρ (k) EW ρ (k)
- Page 109 and 110:
✬ ✩ ✬ ✩ Lemma 5.3.4 (Ncut a
- Page 111 and 112:
In other words, roundoff errors may
- Page 113 and 114:
Theory: linear convergence of (5.3.
- Page 115 and 116:
error in eigenvalue 10 0 10 −2 10
- Page 117 and 118:
✬ Residuals r 0 ,...,r m−1 gene
- Page 119 and 120:
Algebraic view of the Arnoldi proce
- Page 121 and 122:
5.5 Singular Value Decomposition Re
- Page 123 and 124:
Illustration: columns = ONB of Im(A
- Page 125 and 126:
✬ Theorem 5.5.7 (best low rank ap
- Page 127 and 128:
Reassuring: Remark 6.0.4 (Pseudoinv
- Page 129 and 130:
Consider the linear least squares p
- Page 131 and 132:
Goal: Euclidean distance of y ∈ R
- Page 133 and 134:
6.5 Non-linear Least Squares If (6.
- Page 135 and 136:
0 2 4 6 8 10 12 14 16 value of ∥
- Page 137 and 138:
Definition 7.1.1 (Discrete convolut
- Page 139 and 140:
Expand a 0 ,...,a n−1 and b 0 , .
- Page 141 and 142:
(7.2.2) is a simple consequence of
- Page 143 and 144:
Dominant coefficients of a signal a
- Page 145 and 146:
11 c = f f t ( y ) ; 12 13 figure (
- Page 147 and 148:
Two-dimensional trigonometric basis
- Page 149 and 150:
8 end 9 t1 = min ( t1 , toc ) ; 10
- Page 151 and 152:
Step II: for k =: rq + s, 0 ≤ r <
- Page 153 and 154:
MATLAB-CODE Sine transform function
- Page 155 and 156:
△ Example 7.5.2 (Linear regressio
- Page 157 and 158:
[23, Ch. IX] presents the topic fro
- Page 159 and 160:
Code 8.1.3: Horner scheme, polynomi
- Page 161 and 162:
1.2 equality in (8.2.10) for y := (
- Page 163 and 164:
ecursive definition: p i (t) ≡ y
- Page 165 and 166:
a 1 = y 1 − a 0 t 1 − t 0 = y 1
- Page 167 and 168:
Observations: Strong oscillations o
- Page 169 and 170:
−1 −0.8 −0.6 −0.4 −0.2 0
- Page 171 and 172:
8.5.3 Chebychev interpolation: comp
- Page 173 and 174:
9.1 Shape preserving interpolation
- Page 175 and 176:
9.2.2 Piecewise polynomial interpol
- Page 177 and 178:
Interpolation of the function: f(x)
- Page 179 and 180:
2 % Plot convergence of approximati
- Page 181 and 182:
9.4 Splines Definition 9.4.1 (Splin
- Page 183 and 184:
➤ Linear system of equations with
- Page 185 and 186: y i+1 t i−1 t i t i+1 y i−1 y i
- Page 187 and 188: 35 h= d i f f ( t ) ; 36 d e l t a
- Page 189 and 190: 1 0.9 Function f 1 0.9 Function f
- Page 191 and 192: f 10 Numerical Quadrature Numerical
- Page 193 and 194: f • n = 1: Trapezoidal rule • n
- Page 195 and 196: For fixed local n-point quadrature
- Page 197 and 198: Equidistant trapezoidal rule (order
- Page 199 and 200: Heuristics: A quadrature formula ha
- Page 201 and 202: 20 Zeros of Legendre polynomials in
- Page 203 and 204: |quadrature error| 10 0 Numerical q
- Page 205 and 206: f f • line 9: estimate for global
- Page 207 and 208: Model: autonomous Lotka-Volterra OD
- Page 209 and 210: Example 11.1.6 (Transient circuit s
- Page 211 and 212: y y 1 y(t) y 0 t t 0 t 1 Fig. 133 e
- Page 213 and 214: for discrete evolution defined on I
- Page 215 and 216: ⇒ if y ∈ C 2 ([0, T]), then y(t
- Page 217 and 218: The implementation of an s-stage ex
- Page 219 and 220: Example 11.5.2 (Blow-up). ✸ toler
- Page 221 and 222: However, it would be foolish not to
- Page 223 and 224: 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
- Page 225 and 226: 4 3 2 abstol = 0.000010, reltol = 0
- Page 227 and 228: ✸ ✸ Motivated by the considerat
- Page 229 and 230: 0 1 2 3 4 5 6 u(t),v(t) 0.01 0.008
- Page 231 and 232: MATLAB-CODE : Explicit integration
- Page 233 and 234: Shorthand notation for Runge-Kutta
- Page 235: 13 Structure Preservation 13.1 Diss
- Page 239 and 240: linear in Gauss-Newton method, 538
- Page 241 and 242: Chebychev nodes, 678 double, 634 fo
- Page 243 and 244: x∗ n y ˆ= discrete periodic conv
- Page 245 and 246: Gaussian elimination with pivoting