

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Evident: symmetry of à − bbT<br />
a 11<br />
∈ R n−1,n−1<br />
As A s.p.d. (→ Def. 2.7.1), for every y ∈ R n−1 \ {0}<br />
( ) T (a11<br />
0 <<br />
− bT y b T ) ( )<br />
a − bT y<br />
11<br />
y b Ã<br />
a 11<br />
y<br />
à − bbT<br />
a 11<br />
positive definite.<br />
The proof can also be based on the identities<br />
( )<br />
(A)1:n−1,1:n−1 (A) 1:n−1,n<br />
=<br />
(A) n,1:n−1 (A) n,n<br />
= y T (Ã − bbT<br />
a 11<br />
)y .<br />
( L1 0<br />
l T 1<br />
✷<br />
)( )<br />
U1 u<br />
, (2.6.4)<br />
0 γ<br />
⇒ (A) 1:n−1,1:n−1 = L 1 U 1 , L 1 u = (A) 1:n−1,n , U T 1 l = (A)T n,1:n−1 , lT u + γ = (A) n,n ,<br />
noticing that the principal minor (A) 1:n−1,1:n−1 is also s.p.d. This allows a simple induction argument.<br />
Note: no pivoting required (→ Sect. 2.3)<br />
(partial pivoting always picks current pivot row)<br />
Ôº½ ¾º<br />
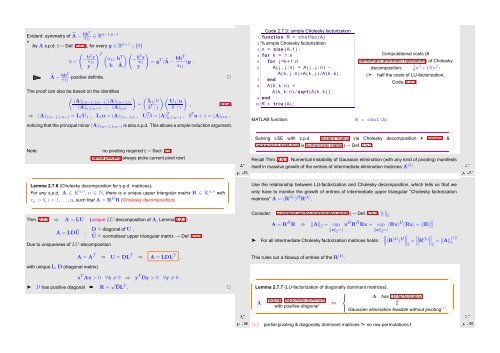
Code 2.7.3: simple Cholesky factorization<br />
1 function R = c h o l f a c (A)<br />
2 % simple Cholesky factorization<br />
3 n = size (A, 1 ) ;<br />
4 for k = 1 : n<br />
5 for j =k +1:n<br />
6 A( j , j : n ) = A( j , j : n ) −<br />
A( k , j : n ) ∗A( k , j ) /A( k , k ) ;<br />
7 end<br />
8 A( k , k : n ) =<br />
A( k , k : n ) / sqrt (A( k , k ) ) ;<br />
9 end<br />
10 R = t r i u (A) ;<br />
MATLAB function:<br />
★<br />
✧<br />
Computational costs (#<br />
elementary arithmetic operations) of Cholesky<br />
decomposition:<br />
1<br />
6 n3 + O(n 2 )<br />
(➣ half the costs of LU-factorization,<br />
R = chol(A)<br />
Code. 2.2.1)<br />
Solving LSE with s.p.d. system matrix via Cholesky decomposition + forward &<br />
backward substitution is numerically stable (→ Def. 2.5.5)<br />
Recall Thm. 2.5.7: <strong>Numerical</strong> instability of Gaussian elimination (with any kind of pivoting) manifests<br />
itself in massive growth of the entries of intermediate elimination matrices A (k) .<br />
✥<br />
✦<br />
Ôº½ ¾º<br />
✬<br />
Lemma 2.7.6 (Cholesky decomposition for s.p.d. matrices).<br />
For any s.p.d. A ∈ K n,n , n ∈ N, there is a unique upper triangular matrix R ∈ K n,n with<br />
r ii > 0, i = 1, ...,n, such that A = R H R (Cholesky decomposition).<br />
✫<br />
Thm. 2.7.5 ⇒ A = LU (unique LU-decomposition of A, Lemma 2.2.3)<br />
A = LDŨ , D ˆ= diagonal of U ,<br />
Ũ ˆ= normalized upper triangular matrix → Def. 2.2.1<br />
Due to uniqueness of LU-decomposition<br />
with unique L, D (diagonal matrix)<br />
A = A T ⇒ U = DL T ⇒ A = LDL T ,<br />
✩<br />
✪<br />
Use the relationship between LU-factorization and Cholesky decomposition, which tells us that we<br />
only have to monitor the growth of entries of intermediate upper triangular “Cholesky factorization<br />
matrices” A = (R (k) ) H R (k) .<br />
Consider: Euclidean vector norm/matrix norm (→ Def. 2.5.2) ‖·‖ 2<br />
➤<br />
A = R H R ⇒ ‖A‖ 2 = sup x H R H Rx = sup (Rx) H (Rx) = ‖R‖ 2 2 .<br />
‖x‖ 2 =1<br />
‖x‖ 2 =1<br />
∥<br />
For all intermediate Cholesky factorization matrices holds: ∥(R (k) ) H∥ ∥ ∥ ∥2 = ∥R (k)∥ ∥ ∥2 = ‖A‖ 1/2<br />
2<br />
This rules out a blowup of entries of the R (k) .<br />
x T Ax > 0 ∀x ≠ 0 ⇒ y T Dy > 0 ∀y ≠ 0 .<br />
➤ D has positive diagonal ➨ R = √ DL T . ✷<br />
Ôº½ ¾º<br />
✬<br />
Lemma 2.7.7 (LU-factorization of diagonally dominant matrices).<br />
⎧<br />
⎨<br />
A has LU-factorization<br />
regular, diagonally dominant<br />
A ⇔<br />
⇕<br />
with positive diagonal ⎩<br />
Gaussian elimination feasible without pivoting (∗)<br />
Ôº½ ¾º<br />
✫<br />
✪<br />
(∗): partial pivoting & diagonally dominant matrices ➣ no row permutations !<br />
✩













