

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
(diagonal) entries of D are strictly positive and we can define<br />
D = diag(λ 1 ,...,λ n ), λ i > 0 ⇒ D 1/2 := diag( √ λ 1 , . .., √ λ n ) .<br />
This is generalized to<br />
B 1/2 := Q T D 1/2 Q ,<br />
and one easily verifies, using Q T = Q −1 , that (B 1/2 ) 2 = B and that B 1/2 is s.p.d. In fact, these two<br />
requirements already determine B 1/2 uniquely.<br />
However, if one formally applies Algorithm 4.2.1 to the transformed system from (4.3.1), it becomes<br />
apparent that, after suitable transformation of the iteration variables p j and r j , B 1/2 and B −1/2 invariably<br />
occur in products B −1/2 B −1/2 = B −1 and B 1/2 B −1/2 = I. Thus, thanks to this intrinsic<br />
transformation square roots of B are not required for the implementation!<br />
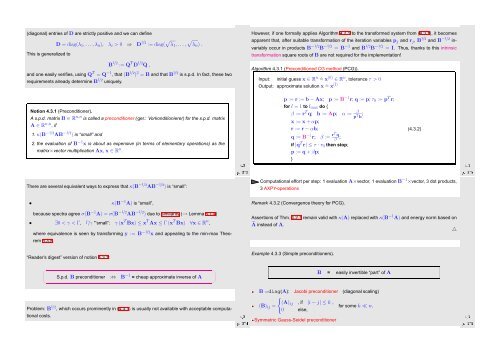
Algorithm 4.3.1 (Preconditioned CG method (PCG)).<br />
Input: initial guess x ∈ R n ˆ= x (0) ∈ R n , tolerance τ > 0<br />
Output: approximate solution x ˆ= x (l)<br />
Notion 4.3.1 (Preconditioner).<br />
A s.p.d. matrix B ∈ R n,n is called a preconditioner (ger.: Vorkonditionierer) for the s.p.d. matrix<br />
A ∈ R n,n , if<br />
1. κ(B −1/2 AB −1/2 ) is “small” and<br />
2. the evaluation of B −1 x is about as expensive (in terms of elementary operations) as the<br />
matrix×vector multiplication Ax, x ∈ R n .<br />
Ôº¿¿ º¿<br />
p := r := b − Ax; p := B −1 r; q := p; τ 0 := p T r;<br />
for l = 1 to l max do {<br />
β := r T q; h := Ap; α := β<br />
p T h ;<br />
x := x + αp;<br />
r := r − αh;<br />
q := B −1 r; β := rT q<br />
β ;<br />
if |q T r| ≤ τ · τ 0 then stop;<br />
p := q + βp;<br />
}<br />
(4.3.2)<br />
Ôº¿ º¿<br />
There are several equivalent ways to express that κ(B −1/2 AB −1/2 ) is “small”:<br />
Computational effort per step: 1 evaluation A×vector, 1 evaluation B −1 ×vector, 3 dot products,<br />
3 AXPY-operations<br />
• κ(B −1 A) is “small”,<br />
because spectra agree σ(B −1 A) = σ(B −1/2 AB −1/2 ) due to similarity (→ Lemma 5.1.4)<br />
• ∃0 < γ < Γ, Γ/γ "‘small”: γ (x T Bx) ≤ x T Ax ≤ Γ (x T Bx) ∀x ∈ R n ,<br />
where equivalence is seen by transforming y := B −1/2 x and appealing to the min-max Theorem<br />
5.3.5.<br />
“Reader’s digest” version of notion 4.3.1:<br />
Remark 4.3.2 (Convergence theory for PCG).<br />
Assertions of Thm. 4.2.7 remain valid with κ(A) replaced with κ(B −1 A) and energy norm based on<br />
à instead of A.<br />
△<br />
Example 4.3.3 (Simple preconditioners).<br />
✗<br />
✖<br />
S.p.d. B preconditioner :⇔ B −1 = cheap approximate inverse of A<br />
✔<br />
✕<br />
B = easily invertible “part” of A<br />
Problem: B 1/2 , which occurs prominently in (4.3.1) is usually not available with acceptable computational<br />
costs.<br />
Ôº¿ º¿<br />
B =diag(A): Jacobi preconditioner (diagonal scaling)<br />
{<br />
(B) ij =<br />
(A) ij , if |i − j| ≤ k ,<br />
0 else,<br />
for some k ≪ n.<br />
Symmetric Gauss-Seidel preconditioner<br />
Ôº¿ º¿













