

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Ax = b :<br />
1 LU-decomposition A = LU, #elementary operations 1 3n(n − 1)(n + 1)<br />
2 forward substitution, solve Lz = b, #elementary operations 1 2n(n − 1)<br />
3 backward substitution, solve Ux = z, #elementary operations 1 2n(n + 1)<br />
(in leading order) the same as for Gaussian elimination<br />
Remark 2.2.6 (Many sequential solutions of LSE).<br />
With A 11 ∈ K n,n regular, A 12 ∈ K n,m , A 21 ∈ K m,n , A 22 ∈ K m,m :<br />
( ) ( ) ( )<br />
A11 A 12 I 0 A11 A Schur complement<br />
=<br />
12<br />
A 21 A 22 A 21 A −1<br />
,<br />
11 I 0 S S := A 22 − A 21 A −1<br />
11 A 12<br />
→ block Gaussian elimination, see Rem. 2.1.4.<br />
(2.2.2)<br />
△<br />
Given:<br />
regular matrix A ∈ K n,n , n ∈ N, and N ∈ N, both n,N large<br />
foolish !<br />
1 % Setting: N ≫ 1, large matrix A<br />
2 for j =1:N<br />
3 x = A\ b ;<br />
4 b = some_function ( x ) ;<br />
5 end<br />
computational effort O(Nn 3 )<br />
smart !<br />
1 % Setting: N ≫ 1, large matrix A<br />
2 [ L ,U] = lu (A) ;<br />
3 for j =1:N<br />
4 x = U \ ( L \ b ) ;<br />
5 b = some_function ( x ) ;<br />
6 end<br />
Ôº¿ ¾º¾<br />
+ N backward substitutions (cost Nn 2 )<br />
computational effort O(n 3 + Nn 2 )<br />
Efficient implementation requires one LU-decomposition of A (cost O(n 3 )) + N forward substitutions<br />
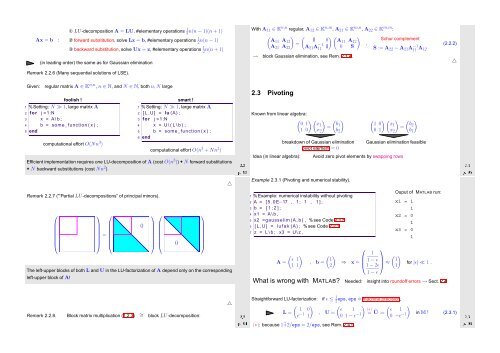
Remark 2.2.7 ("‘Partial LU-decompositions” of principal minors).<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
⎛<br />
=<br />
⎟ ⎜<br />
⎠ ⎝<br />
0<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝ 0<br />
The left-upper blocks of both L and U in the LU-factorization of A depend only on the corresponding<br />
left-upper block of A!<br />
⎞<br />
⎟<br />
⎠<br />
△<br />
2.3 Pivoting<br />
Known from linear algebra:<br />
( ) ( ) ( ) ( )( ) ( )<br />
0 1 x1 b1<br />
1 0 x1 b2<br />
= =<br />
1 0 x 2 b 2 0 1 x 2 b 1<br />
Idea (in linear algebra):<br />
breakdown of Gaussian elimination<br />
pivot element = 0<br />
Example 2.3.1 (Pivoting and numerical stability).<br />
1 % Example: numerical instability without pivoting<br />
2 A = [ 5 . 0 E−17 , 1 ; 1 , 1 ] ;<br />
3 b = [ 1 ; 2 ] ;<br />
4 x1 = A \ b ,<br />
5 x2 =gausselim (A, b ) , % see Code 2.1.5<br />
6 [ L ,U] = l u f a k (A) ; % see Code 2.2.1<br />
7 z = L \ b ; x3 = U\ z ,<br />
A =<br />
( )<br />
ǫ 1<br />
1 1<br />
Gaussian elimination feasible<br />
Avoid zero pivot elements by swapping rows<br />
(<br />
1<br />
, b =<br />
2)<br />
⎛<br />
⇒ x = ⎜<br />
⎝<br />
1<br />
1 − ǫ<br />
1 − 2ǫ<br />
1 − ǫ<br />
⎞<br />
( )<br />
⎟ 1<br />
⎠ ≈ 1<br />
Ouput of MATLAB run:<br />
x1 = 1<br />
1<br />
x2 = 0<br />
1<br />
x3 = 0<br />
1<br />
for |ǫ| ≪ 1 .<br />
What is wrong with MATLAB? Needed: insight into roundoff errors → Sect. 2.4<br />
Ôº ¾º¿<br />
△<br />
Remark 2.2.8. Block matrix multiplication (1.2.3) ∼ = block LU-decomposition:<br />
Ôº ¾º¾<br />
Straightforward LU-factorization: if ǫ ≤ 1 2eps,eps ˆ= machine precision,<br />
( ) ( ) ( )<br />
1 0 ǫ 1 (∗) ǫ 1<br />
L =<br />
ǫ −1 , U =<br />
1 0 1 − ǫ −1 = Ũ := 0 −ǫ −1<br />
(∗): because 1˜+2/eps = 2/eps, see Rem. 2.4.9.<br />
in M ! (2.3.1)<br />
Ôº ¾º¿













