

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Rewriting estimate of Thm. 2.5.9 with ∆b = 0,<br />
ǫ r :=<br />
‖x − ˜x‖<br />
‖x‖<br />
≤<br />
cond(A)δ A<br />
, δ<br />
1 − cond(A)δ A := ‖∆A‖<br />
A ‖A‖ . (2.5.8)<br />
(2.5.8) ➣ If cond(A) ≫ 1, small perturbations in A can lead to large relative errors in the<br />
solution of the LSE.<br />
★<br />
If cond(A) ≫ 1, a stable algorithm (→ Def. 2.5.5) can produce solutions<br />
with large relative error !<br />
✧<br />
Example 2.5.8 (Conditioning and relative error).<br />
→ Ex. 2.5.3 cnt’d<br />
✥<br />
✦<br />
cond 2<br />
(A)<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
0 50 100 150<br />
n<br />
200 250 300<br />
Fig. 8<br />
relative error (Euclidean norm)<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
Gaussian elimination<br />
10 −8<br />
QR−decomposition<br />
relative residual norm<br />
10 −10<br />
10 −12<br />
10 −14<br />
10 −16<br />
0 100 200 300 400 500<br />
n<br />
600 700 800 900 1000<br />
Fig. 9<br />
<strong>Numerical</strong> experiment with nearly singular matrix<br />
from Ex. 2.5.3<br />
A = uv T + ǫI ,<br />
cond(A)<br />
10 20<br />
10 19<br />
10 18<br />
10 17<br />
10 16<br />
u = 1 3 (1, 2, 3,...,10)T 10<br />
,<br />
−2<br />
10 15<br />
v = (−1, 1 2 , −1 3 , 1 4 , ..., 10 1 )T 10 −3<br />
10 14<br />
Ôº½¿¿ ¾º<br />
10 13<br />
10 −4<br />
relative error<br />
10 12<br />
10 −14 10 −13 10 −12 10 −11 10 −10 10 −9 10 −8 10 −7 10 −6 10 −5<br />
10−5<br />
ε<br />
Fig. 7 ✸<br />
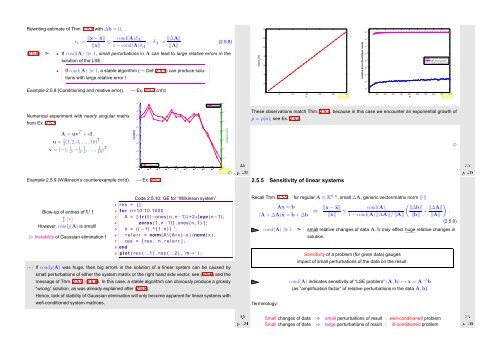
Example 2.5.9 (Wilkinson’s counterexample cnt’d). → Ex. 2.5.2<br />
cond(A)<br />
10 2<br />
10 1<br />
10 0<br />
10 −1<br />
relative error<br />
These observations match Thm. 2.5.7, because in this case we encounter an exponential growth of<br />
ρ = ρ(n), see Ex. 2.5.2.<br />
2.5.5 Sensitivity of linear systems<br />
✸<br />
Ôº½¿ ¾º<br />
Blow-up of entries of U !<br />
↕ (∗)<br />
However, cond 2 (A) is small!<br />
✄ Instability of Gaussian elimination !<br />
Code 2.5.10: GE for “Wilkinson system”<br />
1 res = [ ] ;<br />
2 for n=10:10:1000<br />
3 A = [ t r i l (−ones ( n , n−1) ) +2∗[eye ( n−1) ;<br />
4 zeros ( 1 , n−1) ] , ones ( n , 1 ) ] ;<br />
5 x = (( −1) . ^ ( 1 : n ) ) ’ ;<br />
6 r e l e r r = norm(A \ ( A∗x )−x ) / norm( x ) ;<br />
7 res = [ res ; n , r e l e r r ] ;<br />
8 end<br />
9 plot ( res ( : , 1 ) , res ( : , 2 ) , ’m−∗ ’ ) ;<br />
(∗) If cond 2 (A) was huge, then big errors in the solution of a linear system can be caused by<br />
small perturbations of either the system matrix or the right hand side vector, see (2.5.6) and the<br />
message of Thm. 2.5.9, (2.5.8). In this case, a stable algorithm can obviously produce a grossly<br />
“wrong” solution, as was already explained after (2.5.8).<br />
Hence, lack of stability of Gaussian elimination will only become apparent for linear systems with<br />
well-conditioned system matrices.<br />
Ôº½¿ ¾º<br />
Recall Thm. 2.5.9:<br />
Ax = b<br />
(A + ∆A)˜x = b + ∆b<br />
cond(A) ≫ 1 ➣<br />
Terminology:<br />
for regular A ∈ K n,n , small ∆A, generic vector/matrix norm ‖·‖<br />
⇒<br />
‖x − ˜x‖<br />
‖x‖<br />
≤<br />
cond(A)<br />
1 − cond(A) ‖∆A‖/‖A‖<br />
( ‖∆b‖<br />
‖b‖ + ‖∆A‖<br />
‖A‖<br />
)<br />
.<br />
(2.5.9)<br />
small relative changes of data A,b may effect huge relative changes in<br />
solution.<br />
Sensitivity of a problem (for given data) gauges<br />
impact of small perturbations of the data on the result.<br />
cond(A) indicates sensitivity of “LSE problem” (A,b) ↦→ x = A −1 b<br />
(as “amplification factor” of relative perturbations in the data A,b).<br />
Ôº½¿ ¾º<br />
Small changes of data ⇒ small perturbations of result : well-conditioned problem<br />
Small changes of data ⇒ large perturbations of result : ill-conditioned problem













