

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Example 2.5.1 (Matrix norm associated with ∞-norm and 1-norm).<br />
e.g. for M ∈ K 2,2 : ‖Mx‖ ∞ = max{|m 11 x 1 + m 12 x 2 |, |m 21 x 1 + m 22 x 2 |}<br />
≤ max{|m 11 | + |m 12 |, |m 21 | + |m 22 |} ‖x‖ ∞ ,<br />
‖Mx‖ 1 = |m 11 x 1 + m 12 x 2 | + |m 21 x 1 + m 22 x 2 |<br />
≤ max{|m 11 | + |m 21 |, |m 12 | + |m 22 |}(|x 1 | + |x 2 |) .<br />
For general M ∈ K m,n<br />
n∑<br />
➢ matrix norm ↔ ‖·‖ ∞ = row sum norm ‖M‖ ∞ := max |m ij | , (2.5.4)<br />
i=1,...,m<br />
j=1<br />
m∑<br />
➢ matrix norm ↔ ‖·‖ 1 = column sum norm ‖M‖ 1 := max |m ij | . (2.5.5)<br />
j=1,...,n<br />
i=1<br />
✸<br />
Special formulas for Euclidean matrix norm [18, Sect. 2.3.3]:<br />
✬<br />
Lemma 2.5.3 (Formula for Euclidean norm of a Hermitian matrix).<br />
✫<br />
Proof.<br />
A ∈ K n,n , A = A H |x H Ax|<br />
⇒ ‖A‖ 2 = max<br />
x≠0 ‖x‖ 2 2<br />
✩<br />
¾º<br />
✪<br />
.<br />
Ôº½½<br />
Recall from linear algebra: Hermitian matrices (a special class of normal matrices) enjoy<br />
unitary simularity to diagonal matrices:<br />
∃U ∈ K n,n , diagonal D ∈ R n,n : U −1 = U H and A = U H DU .<br />
Since multiplication with an unitary matrix preserves the 2-norm of a vector, we conclude<br />
∥<br />
‖A‖ 2 = ∥U H DU∥ = ‖D‖ 2 2 = max |d i| , D = diag(d 1 ,...,d n ) .<br />
i=1,...,i<br />
On the other hand, for the same reason:<br />
2.5.2 <strong>Numerical</strong> Stability<br />
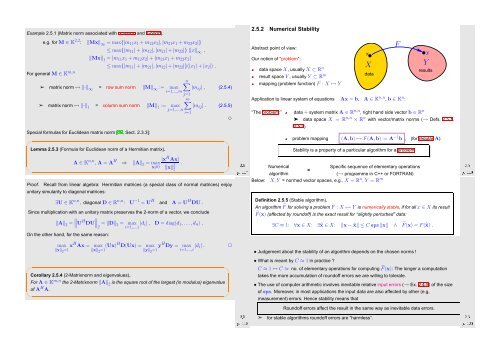
Abstract point of view:<br />
Our notion of “problem”:<br />
data space X, usually X ⊂ R n<br />
result space Y , usually Y ⊂ R m<br />
mapping (problem function) F : X ↦→ Y<br />
x<br />
X<br />
data<br />
Application to linear system of equations Ax = b, A ∈ K n,n , b ∈ K n :<br />
“The problem:”<br />
F<br />
y<br />
Y<br />
results<br />
data ˆ= system matrix A ∈ R n,n , right hand side vector b ∈ R n<br />
➤ data space X = R n,n × R n with vector/matrix norms (→ Defs. 2.5.1,<br />
2.5.2)<br />
problem mapping (A,b) ↦→ F(A,b) := A −1 b , (for regular A)<br />
Ôº½½ ¾º<br />
(→ programme in C++ or FORTRAN)<br />
Stability is a property of a particular algorithm for a problem<br />
<strong>Numerical</strong><br />
Specific sequence of elementary operations<br />
=<br />
algorithm<br />
Below: X, Y = normed vector spaces, e.g., X = R n , Y = R m<br />
Definition 2.5.5 (Stable algorithm).<br />
An algorithm ˜F for solving a problem F : X ↦→ Y is numerically stable, if for all x ∈ X its result<br />
˜F(x) (affected by roundoff) is the exact result for “slightly perturbed” data:<br />
∃C ≈ 1: ∀x ∈ X: ∃̂x ∈ X: ‖x − ̂x‖ ≤ Ceps ‖x‖ ∧ ˜F(x) = F(̂x) .<br />
✬<br />
✫<br />
max<br />
‖x‖ 2 =1 xH Ax = max<br />
‖x‖ 2 =1 (Ux)H D(Ux) = max<br />
‖y‖ 2 =1 yH Dy = max |d i| .<br />
i=1,...,i<br />
Corollary 2.5.4 (2-Matrixnorm and eigenvalues).<br />
For A ∈ K m,n the 2-Matrixnorm ‖A‖ 2 is the square root of the largest (in modulus) eigenvalue<br />
of A H A.<br />
✷<br />
✩<br />
✪<br />
Ôº½½ ¾º<br />
• Judgement about the stability of an algorithm depends on the chosen norms !<br />
• What is meant by C ≈ 1 in practice ?<br />
C ≈ 1 ↔ C ≈ no. of elementary operations for computing ˜F(x): The longer a computation<br />
takes the more accumulation of roundoff errors we are willing to tolerate.<br />
• The use of computer arithmetic involves inevitable relative input errors (→ Ex. 2.4.5) of the size<br />
ofeps. Moreover, in most applications the input data are also affected by other (e.g,<br />
measurement) errors. Hence stability means that<br />
Ôº½¾¼ ¾º<br />
Roundoff errors affect the result in the same way as inevitable data errors.<br />
➣ for stable algorithms roundoff errors are “harmless”.













