

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Shorthand notation for Runge-Kutta methods<br />
Butcher scheme<br />
Note: now A can be a general s × s-matrix.<br />
✄<br />
c A<br />
b T :=<br />
c 1 a 11 · · · a 1s<br />
. . .<br />
. (12.3.3)<br />
c s a s1 · · · a ss<br />
b 1 · · · b s<br />
A strict lower triangular matrix ➤ explicit Runge-Kutta method, Def. 11.4.1<br />
A lower triangular matrix ➤ diagonally-implicit Runge-Kutta method (DIRK)<br />
Definition 12.3.3 (L-stable Runge-Kutta method).<br />
A Runge-Kutta method (→ Def. 12.3.1) is L-stable/asymptotically stable, if its stability function<br />
(→ Def. 12.3.2) satisfies<br />
(i) Re z < 0 ⇒ |S(z)| < 1 , (12.3.5)<br />
(ii)<br />
lim S(z) = 0 . (12.3.6)<br />
Rez→−∞<br />
Remark 12.3.3 (Necessary condition for L-stability of Runge-Kutta methods).<br />
Model problem analysis for general Runge-Kutta single step methods (→ Def. 12.3.1): exactly the<br />
same as for explicit RK-methods, see (12.1.6), (12.1.7)!<br />
Consider:<br />
Assume:<br />
Runge-Kutta method (→ Def. 12.3.1) with Butcher scheme c A b T<br />
A ∈ R s,s is regular<br />
Ôº¾ ½¾º¿<br />
For a rational function S(z) = P(z) the limit for |z| → ∞ exists and can easily be expressed by the<br />
Q(z)<br />
leading coefficients of the polynomials P and Q:<br />
Ôº¿½ ½¾º¿<br />
If b T = (A) T :,j (row of A) ⇒ S(−∞) = 0 . (12.3.8)<br />
Thm. 12.3.2 ⇒ S(−∞) = 1 − b T A −1 1 . (12.3.7)<br />
✬<br />
✩<br />
Theorem 12.3.2 (Stability function of Runge-Kutta methods).<br />
The discrete evolution Ψ h λ<br />
of an s-stage Runge-Kutta single step method (→ Def. 12.3.1) with<br />
Butcher scheme c A bT (see (12.3.3)) for the ODE ẏ = λy is a multiplication operator according<br />
to<br />
Ψ h λ = 1 + zbT (I − zA) −1 1<br />
} {{ }<br />
stability function S(z)<br />
✫<br />
= det(I − zA + z1bT )<br />
det(I − zA)<br />
, z := λh , 1 = (1, ...,1) T ∈ R s .<br />
✪<br />
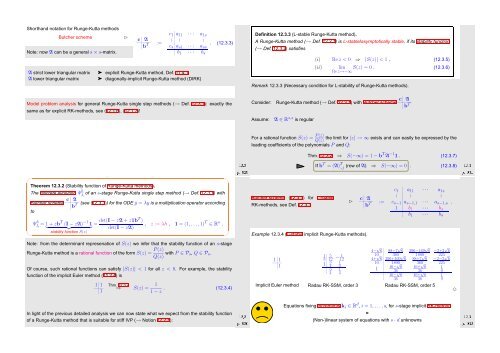
Butcher scheme (12.3.3) for L-stable<br />
✄ c A RK-methods, see Def. 12.3.3<br />
b T :=<br />
Example 12.3.4 (L-stable implicit Runge-Kutta methods).<br />
c 1 a 11 · · · a 1s<br />
. .<br />
.<br />
c s−1 a s−1,1 · · · a s−1,s .<br />
b 1 · · · b s<br />
1 b 1 · · · b s<br />
△<br />
Note: from the determinant represenation of S(z) we infer that the stability function of an s-stage<br />
Runge-Kutta method is a rational function of the form S(z) = P(z)<br />
Q(z) with P ∈ P s, Q ∈ P s .<br />
Of course, such rational functions can satisfy |S(z)| < 1 for all z < 0. For example, the stability<br />
function of the implicit Euler method (11.2.4) is<br />
1 1<br />
1<br />
Thm. 12.3.2<br />
⇒ S(z) = 1<br />
1 − z . (12.3.4)<br />
1 1<br />
1<br />
1 5<br />
3 12 −12<br />
1<br />
1 3 1<br />
4 4<br />
3 1<br />
4 4<br />
4− √ 6 88−7 √ 6 296−169 √ 6 −2+3 √ 6<br />
10 360 1800 225<br />
4+ √ 6 296+169 √ 6 88+7 √ 6 −2−3 √ 6<br />
10 1800 360 225<br />
16− √ 6 16+ √ 6<br />
1<br />
1<br />
36 36 9<br />
16− √ 6 16+ √ 6 1<br />
36 36 9<br />
Implicit Euler method Radau RK-SSM, order 3 Radau RK-SSM, order 5<br />
✸<br />
In light of the previous detailed analysis we can now state what we expect from the stability function<br />
of a Runge-Kutta method that is suitable for stiff IVP (→ Notion 12.2.1):<br />
Ôº¿¼ ½¾º¿<br />
Equations fixing increments k i ∈ R d , i = 1, ...,s, for s-stage implicit RK-method<br />
=<br />
(Non-)linear system of equations with s · d unknowns<br />
Ôº¿¾ ½¾º¿













