

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Thus, iterative solvers for solving Aw = z (k−1) may be considered, see Sect. 4. However, the<br />
required accuracy is not clear a priori. Here we examine an approach that completely dispenses with<br />
an iterative solver and uses a preconditioner (→ Def. 4.3.1) instead.<br />
Idea:<br />
(for inverse iteration without shift, A = A H s.p.d.)<br />
Instead of solving Aw = z (k−1) compute w = B −1 z (k−1) with<br />
“inexpensive” s.p.d. approximate inverse B −1 ≈ A −1<br />
➣ B ˆ= Preconditioner for A, see Def. 4.3.1<br />
Code 5.3.18: preconditioned inverse iteration (5.3.18)<br />
1 function [ lmin , z , res ] = p i n v i t ( evalA , n , invB , t o l , maxit )<br />
2 z = ( 1 : n ) ’ ; z = z / norm( z ) ; res = [ ] ; rho = 0 ;<br />
3 for i =1: maxit<br />
4 v = evalA ( z ) ; rhon = dot ( v , z ) ; r = v − rhon∗z ;<br />
5 z = z − invB ( r ) ; z = z / norm( z ) ; res = [ res ; rhon ] ;<br />
6 i f ( abs ( rho−rhon ) < t o l ∗abs ( rhon ) ) , break ;<br />
7 else rho = rhon ; end<br />
8 end<br />
9 lmin = dot ( evalA ( z ) , z ) ; res = [ res ; lmin ] ,<br />
Example 5.3.19 (Convergence of PINVIT).<br />
Computational<br />
effort:<br />
1 matrix×vector<br />
1 evaluation of<br />
preconditioner<br />
A<br />
few<br />
AXPY-operations<br />
!<br />
Possible to replace A −1 with B −1 in inverse iteration ?<br />
NO, because we are not interested in smallest eigenvalue of B !<br />
Replacement A −1 → B −1 possible only when applied to residual quantity<br />
residual quantity = quantity that → 0 in the case of convergence to exact solution<br />
Ôº º¿<br />
S.p.d. matrix A ∈ R n,n , tridiagonal preconditioner, see Ex. 4.3.4<br />
1 A = spdiags ( repmat ( [ 1 / n, −1 ,2∗(1+1/n ) , −1 ,1/n ] , n , 1 ) ,[−n/2 , −1 ,0 ,1 ,n / 2 ] , n , n ) ;<br />
2 evalA = @( x ) A∗x ;<br />
3 % inverse iteration<br />
4 invB = @( x ) A \ x ;<br />
5 % tridiagonal preconditioning<br />
6 B = spdiags ( spdiags (A,[ − 1 ,0 ,1]) ,[ −1 ,0 ,1] , n , n ) ; invB = @( x ) B \ x ;<br />
Ôº º¿<br />
Natural residual quantity for eigenvalue problem Ax = λx:<br />
r := Az − ρ A (z)z , ρ A (z) = Rayleigh quotient → Def. 5.3.1 .<br />
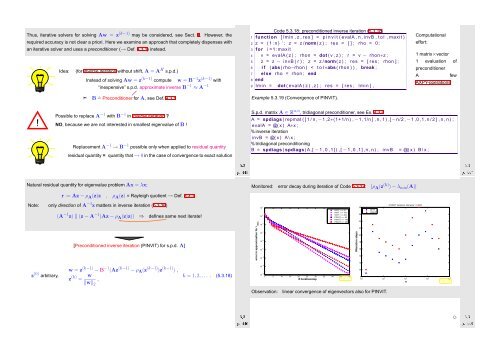
Monitored: error decay during iteration of Code 5.3.17: |ρ A (z (k) ) − λ min (A)|<br />
Note: only direction of A −1 z matters in inverse iteration (5.3.16)<br />
(A −1 z) ‖ (z − A −1 (Az − ρ A (z)z)) ⇒ defines same next iterate!<br />
[Preconditioned inverse iteration (PINVIT) for s.p.d. A]<br />
error in approximation for λ max<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
10 −8<br />
10 −10<br />
INVIT, n = 50<br />
INVIT, n = 100<br />
INVIT, n = 200<br />
PINVIT, n = 50<br />
PINVIT, n = 100<br />
PINVIT, n = 200<br />
#iteration steps<br />
28<br />
26<br />
24<br />
22<br />
20<br />
18<br />
16<br />
14<br />
INVIT<br />
PINVIT<br />
(P)INVIT iterations: tolerance = 0.0001<br />
12<br />
z (0) arbitrary,<br />
w = z (k−1) − B −1 (Az (k−1) − ρ A (z (k−1) )z (k−1) ) ,<br />
z (k) =<br />
w ,<br />
‖w‖ 2<br />
k = 1, 2,... . (5.3.18)<br />
10 2 # iterationstep<br />
10 −12<br />
10 −14<br />
0 5 10 15 20 25 30 35 40 45 50<br />
10<br />
8<br />
Fig. 71 10 1 10 2 10 3 10 4 10 5<br />
n<br />
Fig. 72<br />
Observation:<br />
linear convergence of eigenvectors also for PINVIT.<br />
Ôº º¿<br />
Ôº º¿ ✸













