

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2<br />
0.05<br />
0.045<br />
Solving d t<br />
y = a cos(y) 2 with a = 40.000000 by simple adaptive timestepping<br />
Error vs. no. of timesteps for d t<br />
y = a cos(y) 2 with a = 40.000000<br />
10 1 no. N of timesteps<br />
uniform timestep<br />
adaptive timestep<br />
Observations:<br />
y<br />
0.04<br />
0.035<br />
0.03<br />
0.025<br />
0.02<br />
0.015<br />
rtol = 0.400000<br />
0.01<br />
rtol = 0.200000<br />
rtol = 0.100000<br />
rtol = 0.050000<br />
0.005<br />
rtol = 0.025000<br />
rtol = 0.012500<br />
rtol = 0.006250<br />
0<br />
t<br />
Fig. 150<br />
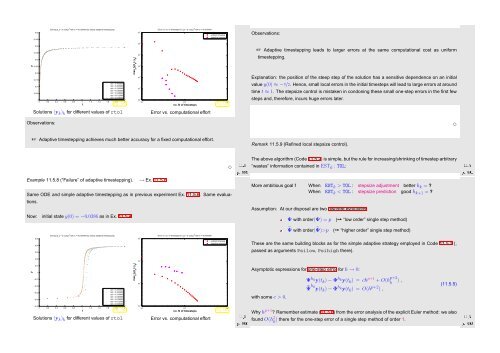
Solutions (y k ) k for different values of rtol<br />
max k<br />
|y(t k<br />
)−y k<br />
|<br />
10 0<br />
10 −1<br />
10 −2<br />
10 −3<br />
10 −4<br />
10 −5<br />
10 1 10 2 10 3<br />
Error vs. computational effort<br />
Fig. 151<br />
☞ Adaptive timestepping leads to larger errors at the same computational cost as uniform<br />
timestepping.<br />
Explanation: the position of the steep step of the solution has a sensitive dependence on an initial<br />
value y(0) ≈ −π/2. Hence, small local errors in the initial timesteps will lead to large errors at around<br />
time t ≈ 1. The stepsize control is mistaken in condoning these small one-step errors in the first few<br />
steps and, therefore, incurs huge errors later.<br />
Observations:<br />
✸<br />
☞ Adaptive timestepping achieves much better accuracy for a fixed computational effort.<br />
Ôº ½½º<br />
✸<br />
Remark 11.5.9 (Refined local stepsize control).<br />
The above algorithm (Code 11.5.2) is simple, but the rule for increasing/shrinking of timestep arbitrary<br />
“wastes” information contained in EST k : TOL:<br />
Ôº½ ½½º<br />
Example 11.5.8 (“Failure” of adaptive timestepping). → Ex. 11.5.6<br />
Same ODE and simple adaptive timestepping as in previous experiment Ex. 11.5.6. Same evaluations.<br />
Now: initial state y(0) = −0.0386 as in Ex. 11.5.4<br />
More ambitious goal ! When EST k > TOL : stepsize adjustment better h k = ?<br />
When EST k < TOL : stepsize prediction good h k+1 = ?<br />
Assumption: At our disposal are two discrete evolutions:<br />
Ψ with order(Ψ) = p (➙ “low order” single step method)<br />
˜Ψ with order(˜Ψ)>p (➙ “higher order” single step method)<br />
Solving d t<br />
y = a cos(y) 2 with a = 40.000000 by simple adaptive timestepping<br />
Error vs. no. of timesteps for d t<br />
y = a cos(y) 2 with a = 40.000000<br />
0.05<br />
0.04<br />
0.03<br />
uniform timestep<br />
adaptive timestep<br />
These are the same building blocks as for the simple adaptive strategy employed in Code 11.5.2 (,<br />
passed as arguments Psilow, Psihigh there).<br />
0.02<br />
10 −1<br />
y<br />
0.01<br />
0<br />
−0.01<br />
−0.02<br />
−0.03<br />
−0.04<br />
rtol = 0.400000<br />
rtol = 0.200000<br />
rtol = 0.100000<br />
rtol = 0.050000<br />
rtol = 0.025000<br />
rtol = 0.012500<br />
rtol = 0.006250<br />
−0.05<br />
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2<br />
t<br />
Fig. 152<br />
Solutions (y k ) k for different values of rtol<br />
max k<br />
|y(t k<br />
)−y k<br />
|<br />
10 0 no. N of timesteps<br />
10 −2<br />
10 −3<br />
10 1 10 2 10 3<br />
Error vs. computational effort<br />
Fig. 153<br />
Ôº¼ ½½º<br />
Asymptotic expressions for one-step error for h → 0:<br />
with some c > 0.<br />
Ψ h ky(t k ) − Φ h ky(t k ) = ch p+1 + O(h p+2<br />
k ) ,<br />
˜Ψ hk y(t k ) − Φ h ky(t k ) = O(h p+2 ) ,<br />
(11.5.5)<br />
Ôº¾<br />
Why h p+1 ? Remember estimate (11.3.6) from the error analysis of the explicit Euler method: we also<br />
found O(h 2 k ) there for the one-step error of a single step method of order 1.<br />
½½º













