

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Proof.<br />
(2.1.3) → induction w.r.t. n: After 1st step of elimination:<br />
a (1)<br />
ij = a ij − a i1<br />
a 11<br />
a 1j , i,j = 2,...,n ⇒ a (1)<br />
ii > 0 .<br />
Goal: Estimate relative perturbations in F(x) due to relative perturbations in x.<br />
(cf. the same investigations for linear systems of equations in Sect. 2.5.5 and Thm. 2.5.9)<br />
|a (1)<br />
n ii | − ∑<br />
|a (1) ∣<br />
ij | = ∣∣aii<br />
− a i1<br />
j=2<br />
j≠i<br />
∣ ∣∣<br />
∑ n ∣<br />
a<br />
a 1i − ∣a ij − a ∣<br />
i1 ∣∣<br />
a<br />
11 a 1j<br />
11<br />
≥ a ii − |a i1||a 1i |<br />
−<br />
a 11<br />
≥ a ii − |a i1||a 1i |<br />
−<br />
a 11<br />
j=2<br />
j≠i<br />
n∑<br />
j=2<br />
j≠i<br />
n∑<br />
j=2<br />
j≠i<br />
|a ij | − |a i1|<br />
a 11<br />
∑ n |a 1j |<br />
j=2<br />
j≠i<br />
|a ij | − |a i1 | a 11 − |a 1i |<br />
a 11<br />
≥ a ii −<br />
n∑<br />
|a ij | ≥ 0 .<br />
j=1<br />
j≠i<br />
We assume that K n is equipped with some vector norm (→ Def. 2.5.1) and we use the induced<br />
matrix norm (→ Def. 2.5.2) on K n,n .<br />
Ax = y ⇒<br />
∥<br />
‖x‖ ≤ ∥A −1∥ ∥ ‖y‖<br />
A(x + ∆x) = y + ∆y ⇒ A∆x = ∆y ⇒ ‖∆y‖ ≤ ‖A‖ ‖∆x‖<br />
⇒<br />
‖∆y‖<br />
‖y‖ ≤ ‖A‖ ‖∆x‖<br />
∥<br />
∥A −1∥ ∥ −1 ‖x‖ = cond(A)‖∆x‖ ‖x‖ . (2.8.1)<br />
relative perturbation in result<br />
relative perturbation in data<br />
A regular, diagonally dominant ⇒ partial pivoting according to (2.3.4) selects i-th row in i-th step.<br />
➣<br />
Condition number cond(A) (→ Def. 2.5.11) bounds amplification of relative error in argument<br />
vector in matrix×vector-multiplication x ↦→ Ax.<br />
△<br />
Remark 2.7.4 (Telling MATLAB about matrix properties).<br />
MATLAB-\ assumes generic matrix, cannot detect special properties of (fully populated) matrix (e.g.<br />
Ôº½ ¾º<br />
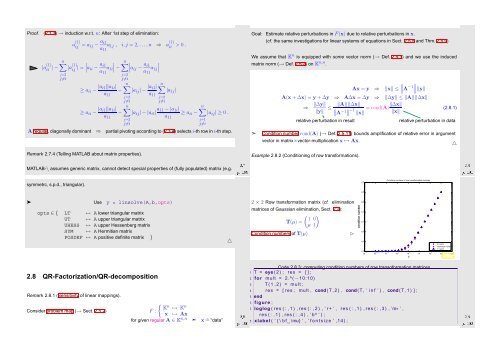
Example 2.8.2 (Conditioning of row transformations).<br />
Ôº½½ ¾º<br />
symmetrc, s.p.d., triangular).<br />
Condition numbers of row transformation matrices<br />
10 7 µ<br />
10 6<br />
➤ Use y = linsolve(A,b,opts)<br />
opts ∈ { LT ↔ A lower triangular matrix<br />
UT ↔ A upper triangular matrix<br />
UHESS ↔ A upper Hessenberg matrix<br />
SYM ↔ A Hermitian matrix<br />
POSDEF ↔ A positive definite matrix }<br />
△<br />
2 × 2 Row transformation matrix (cf. elimination<br />
matrices of Gaussian elimination, Sect. 2.2):<br />
( )<br />
1 0<br />
T(µ) =<br />
µ 1<br />
Condition numbers of T(µ)<br />
✄<br />
condition number<br />
10 5<br />
10 4<br />
10 3<br />
10 2<br />
10 1<br />
10 0<br />
2−norm<br />
maximum norm<br />
1−norm<br />
10 −4 10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3 10 4<br />
Fig. 20<br />
2.8 QR-Factorization/QR-decomposition<br />
Remark 2.8.1 (Sensitivity of linear mappings).<br />
{<br />
K<br />
Consider problem map (→ Sect. 2.5.2) F :<br />
n ↦→ K n<br />
x ↦→ Ax<br />
Code 2.8.3: computing condition numbers of row transoformation matrices<br />
1 T = eye ( 2 ) ; res = [ ] ;<br />
2 for mult = 2.^( −10:10)<br />
3 T ( 1 , 2 ) = mult ;<br />
4 res = [ res ; mult , cond ( T , 2 ) , cond ( T , ’ i n f ’ ) , cond ( T , 1 ) ] ;<br />
5 end<br />
6 figure ;<br />
7 loglog ( res ( : , 1 ) , res ( : , 2 ) , ’ r + ’ , res ( : , 1 ) , res ( : , 3 ) , ’m∗ ’ ,<br />
res ( : , 1 ) , res ( : , 4 ) , ’ b^ ’ ) ;<br />
Ôº½¼ ¾º<br />
Ôº½¾ ¾º<br />
for given regular A ∈ K n,n ➣ x ˆ= “data” 8 xlabel ( ’ { \ b f \mu} ’ , ’ f o n t s i z e ’ ,14) ;













