

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.1 Descent <strong>Methods</strong><br />
2<br />
16<br />
16<br />
1.5<br />
14<br />
14<br />
12<br />
Focus: Linear system of equations Ax = b, A ∈ R n,n , b ∈ R n , n ∈ N given,<br />
1<br />
12<br />
10<br />
with symmetric positive definite (s.p.d., → Def. 2.7.1) system matrix A<br />
x 2<br />
0.5<br />
0<br />
10<br />
8<br />
J(x 1<br />
,x 2<br />
)<br />
8<br />
6<br />
➨ A-inner product (x,y) ↦→ x T Ay ⇒ “A-geometry”<br />
−0.5<br />
6<br />
4<br />
2<br />
−1<br />
4<br />
0<br />
Definition 4.1.1 (Energy norm).<br />
A s.p.d. matrix A ∈ R n,n induces an energy norm<br />
‖x‖ A := (x T Ax) 1/2 , x ∈ R n .<br />
−1.5<br />
0<br />
−2<br />
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2<br />
x 1<br />
Fig. 41<br />
2<br />
−2<br />
−2<br />
0<br />
x1<br />
2 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2<br />
x 2<br />
Fig. 42<br />
Remark 4.1.1 (Krylov methods for complex s.p.d. system matrices).<br />
✗<br />
✖<br />
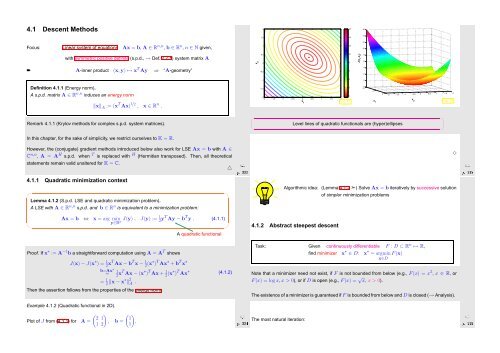
Level lines of quadratic functionals are (hyper)ellipses<br />
✔<br />
✕<br />
In this chapter, for the sake of simplicity, we restrict ourselves to K = R.<br />
However, the (conjugate) gradient methods introduced below also work for LSE Ax = b with A ∈<br />
C n,n , A = A H s.p.d. when T is replaced with H (Hermitian transposed). Then, all theoretical<br />
statements remain valid unaltered for K = C.<br />
4.1.1 Quadratic minimization context<br />
✬<br />
Lemma 4.1.2 (S.p.d. LSE and quadratic minimization problem).<br />
A LSE with A ∈ R n,n s.p.d. and b ∈ R n is equivalent to a minimization problem:<br />
△<br />
✩<br />
Ôº¿¿¿ º½<br />
Algorithmic idea: (Lemma 4.1.2 ➣) Solve Ax = b iteratively by successive solution<br />
of simpler minimization problems<br />
✸<br />
Ôº¿¿ º½<br />
✫<br />
Ax = b ⇔<br />
x = arg min<br />
y∈R n J(y) , J(y) := 1 2 yT Ay − b T y . (4.1.1)<br />
✪<br />
4.1.2 Abstract steepest descent<br />
A quadratic functional<br />
Proof. If x ∗ := A −1 b a straightforward computation using A = A T shows<br />
J(x) − J(x ∗ ) = 1 2 xT Ax − b T x − 1 2 (x∗ ) T Ax ∗ + b T x ∗<br />
Then the assertion follows from the properties of the energy norm.<br />
Example 4.1.2 (Quadratic functional in 2D).<br />
Plot of J from (4.1.1) for A =<br />
b=Ax ∗<br />
= 1 2 xT Ax − (x ∗ ) T Ax + 1 2 (x∗ ) T Ax ∗<br />
= 1 2 ‖x − x∗ ‖ 2 A . (4.1.2)<br />
( ) (<br />
2 1 1<br />
, b =<br />
1 2 1)<br />
Ôº¿¿ º½<br />
.<br />
Task: Given continuously differentiable F : D ⊂ R n ↦→ R,<br />
find minimizer x ∗ ∈ D: x ∗ = argmin F(x)<br />
x∈D<br />
Note that a minimizer need not exist, if F is not bounded from below (e.g., F(x) = x 3 , x ∈ R, or<br />
F(x) = log x, x > 0), or if D is open (e.g., F(x) = √ x, x > 0).<br />
The existence of a minimizer is guaranteed if F is bounded from below and D is closed (→ Analysis).<br />
The most natural iteration:<br />
Ôº¿¿ º½













