

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Advantages:<br />
• “foolproof”<br />
• requires only F evaluations<br />
Example 3.3.3 (Newton method in 1D). (→ Ex. 3.2.1)<br />
Drawbacks:<br />
Merely linear( convergence: ) |x (k) − x ∗ | ≤ 2 −k |b − a|<br />
|b − a|<br />
log 2 steps necessary<br />
tol<br />
Remark 3.3.2. MATLAB function fzero is based on bisection approach.<br />
△<br />
Newton iterations for two different scalar non-linear equation with the same solution sets:<br />
F(x) = xe x − 1 ⇒ F ′ (x) = e x (1 + x) ⇒ x (k+1) = x (k) − x(k) e x(k) − 1<br />
e x(k) (1 + x (k) ) = (x(k) ) 2 + e −x(k)<br />
1 + x (k)<br />
F(x) = x − e −x ⇒ F ′ (x) = 1 + e −x ⇒ x (k+1) = x (k) − x(k) − e −x(k)<br />
= 1 + x(k)<br />
1 + e −x(k) 1 + e x(k)<br />
Ex. 3.2.1 shows quadratic convergence ! (→ Def. 3.1.7)<br />
✸<br />
3.3.2 Model function methods<br />
ˆ= class of iterative methods for finding zeroes of F :<br />
Idea: Given: approximate zeroes x (k) , x (k−1) , ...,x (k−m)<br />
➊ replace F with model function ˜F<br />
(using function values/derivative values in x (k) , x (k−1) ,...,x (k−m) )<br />
➋ x (k+1) := zero of ˜F<br />
(has to be readily available ↔ analytic formula)<br />
Distinguish (see (3.1.1)):<br />
Ôº¾ ¿º¿<br />
Newton iteration (3.3.1)<br />
Φ(x) = x − F(x)<br />
F ′ (x)<br />
From Lemma 3.2.7:<br />
⇒<br />
ˆ= fixed point iteration (→ Sect.3.2) with iteration function<br />
Φ ′ (x) = F(x)F ′′ (x)<br />
(F ′ (x)) 2 ⇒ Φ ′ (x ∗ ) = 0 , , if F(x ∗ ) = 0, F ′ (x ∗ ) ≠ 0 .<br />
Newton method locally quadratically convergent (→ Def. 3.1.7) to zero x ∗ , if F ′ (x ∗ ) ≠ 0<br />
3.3.2.2 Special one-point methods<br />
Ôº¾ ¿º¿<br />
one-point methods : x (k+1) = Φ F (x (k) ), k ∈ N (e.g., fixed point iteration → Sect. 3.2)<br />
multi-point methods : x (k+1) = Φ F (x (k) , x (k−1) , . ..,x (k−m) ), k ∈ N, m = 2, 3,....<br />
Idea underlying other one-point methods:<br />
non-linear local approximation<br />
Useful, if a priori knowledge about the structure of F (e.g. about F being a rational function, see<br />
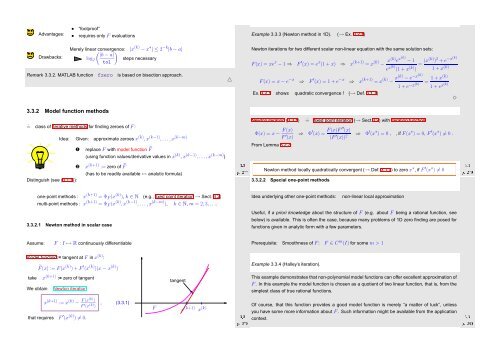
3.3.2.1 Newton method in scalar case<br />
below) is available. This is often the case, because many problems of 1D zero finding are posed for<br />
functions given in analytic form with a few parameters.<br />
Assume:<br />
F : I ↦→ R continuously differentiable<br />
Prerequisite: Smoothness of F : F ∈ C m (I) for some m > 1<br />
model function:= tangent at F in x (k) :<br />
˜F(x) := F(x (k) ) + F ′ (x (k) )(x − x (k) )<br />
Example 3.3.4 (Halley’s iteration).<br />
take<br />
We obtain<br />
x (k+1) := zero of tangent<br />
Newton iteration<br />
tangent<br />
This example demonstrates that non-polynomial model functions can offer excellent approximation of<br />
F . In this example the model function is chosen as a quotient of two linear function, that is, from the<br />
simplest class of true rational functions.<br />
x (k+1) := x (k) − F(x(k) )<br />
F ′ (x (k) )<br />
that requires F ′ (x (k) ) ≠ 0.<br />
, (3.3.1)<br />
F<br />
x (k+1)<br />
x (k)<br />
Ôº¾ ¿º¿<br />
Of course, that this function provides a good model function is merely “a matter of luck”, unless<br />
you have some more information about F . Such information might be available from the application<br />
context.<br />
Ôº¾¼ ¿º¿













