

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
where k ∈ R s ˆ= denotes the vector (k 1 , ...,k s ) T /λ of increments, and z := λh.<br />
y 1 = S(z)y 0 with S(z) := 1 + zb T (I − zA) −1 1 = det(I − zA + z1b T ) . (12.1.7)<br />
The first formula for S(z) immediately follows from (12.1.6), the second is a consequence of<br />
Cramer’s rule.<br />
Remark 12.1.4 (Stepsize control detects instability).<br />
Always look at the bright side of life:<br />
Ex. 12.0.1, 12.1.2: Stepsize control guarantees acceptable solutions, with a hefty price tag however.<br />
△<br />
Thus we have proved the following theorem.<br />
✬<br />
Theorem 12.1.1 (Stability function of explicit Runge-Kutta methods).<br />
The discrete evolution Ψ h λ<br />
of an explicit s-stage Runge-Kutta single step method (→ Def. 11.4.1)<br />
✩<br />
12.2 Stiff problems<br />
with Butcher scheme c A bT (see (11.4.5)) for the ODE ẏ = λy is a multiplication operator<br />
according to<br />
Ψ h λ = 1 + zbT (I − zA) −1 1 = det(I − zA + z1b<br />
} {{ }<br />
T ) , z := λh , 1 = (1, ...,1) T ∈ R s .<br />
stability function S(z)<br />
✫<br />
½¾º½<br />
✪<br />
Thm. 12.1.1 ⇒ S ∈ P s<br />
Ôº¼<br />
Objection: The IVP (12.1.1) may be an oddity rather than a model problem: the weakness of explicit<br />
Runge-Kutta methods discussed in the previous section may be just a peculiar response to an unusual<br />
situation.<br />
This section will reveal that the behavior observed in Ex. 12.0.1 and Ex. 12.1.1 is typical for a large<br />
class of problems and that the model problem (12.1.1) really represents a “generic case”.<br />
Ôº½½ ½¾º¾<br />
Remember from Ex. 12.1.3: for sequence (|y k |) ∞ k=0 produced by explicit Runge-Kutta method applied<br />
to IVP (12.1.1) holds y k = S(λh) k y 0 .<br />
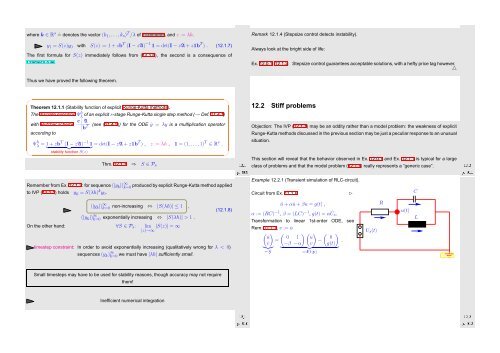
Example 12.2.1 (Transient simulation of RLC-circuit).<br />
Circuit from Ex. 11.1.6<br />
✄<br />
C<br />
(|y k |) ∞ k=0 non-increasing ⇔ |S(λh)| ≤ 1 ,<br />
(12.1.8)<br />
(|y k |) ∞ k=0 exponentially increasing ⇔ |S(λh)| > 1 .<br />
On the other hand: ∀S ∈ P s : lim<br />
|z|→∞ |S(z)| = ∞<br />
timestep constraint: In order to avoid exponentially increasing (qualitatively wrong for λ < 0)<br />
sequences (y k ) ∞ k=0 we must have |λh| sufficiently small.<br />
ü + α ˙u + βu = g(t) ,<br />
α := (RC) −1 , β = (LC) −1 , g(t) = α ˙U s .<br />
Transformation to linear 1st-order ODE, see<br />
Rem. 11.1.7, v := ˙u<br />
( ( ( ) ( )<br />
˙u˙v)<br />
0 1 u 0<br />
=<br />
− .<br />
−β −α)<br />
v g(t)<br />
}{{} } {{ }<br />
=:ẏ<br />
=:f(t,y)<br />
U s (t)<br />
R<br />
u(t)<br />
L<br />
Fig. 161<br />
Small timesteps may have to be used for stability reasons, though accuracy may not require<br />
them!<br />
Inefficient numerical integration<br />
Ôº½¼ ½¾º½<br />
Ôº½¾ ½¾º¾













