

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
2.5<br />
2<br />
1.5<br />
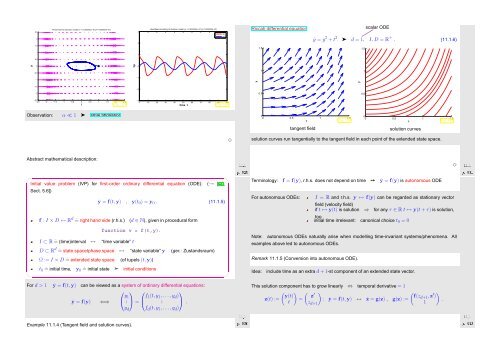
Phase flow for Zeeman model (α = 5.000000e−01,β=1.000000e−01)<br />
3<br />
2<br />
Heartbeat according to Zeeman model (α = 5.000000e−01,β=1.000000e−01)<br />
l(t)<br />
p(t)<br />
Riccati differential equation<br />
1.5<br />
ẏ = y 2 + t 2<br />
➤<br />
scalar ODE<br />
d = 1, I, D = R + . (11.1.6)<br />
1.5<br />
1<br />
1<br />
0.5<br />
p<br />
0<br />
l/p<br />
0<br />
−0.5<br />
1<br />
1<br />
−1<br />
−1<br />
y<br />
y<br />
−1.5<br />
−2<br />
−2<br />
0.5<br />
0.5<br />
−2.5<br />
l<br />
Fig. 128<br />
−3<br />
0 10 20 30 40 50 60 70 80 90 100<br />
time t<br />
Fig. 129<br />
Observation: α ≪ 1 ➤ atrial fibrillation<br />
0<br />
0 0.5 1 1.5<br />
t<br />
Fig. 130<br />
0<br />
0 0.5 1 1.5<br />
t<br />
Fig. 131<br />
tangent field<br />
solution curves<br />
✸<br />
solution curves run tangentially to the tangent field in each point of the extended state space.<br />
Abstract mathematical description:<br />
Ôº¾ ½½º½<br />
Ôº¿½ ½½º½ ✸<br />
✬<br />
Initial value problem (IVP) for first-order ordinary differential equation (ODE): (→ [40,<br />
Sect. 5.6])<br />
ẏ = f(t,y) , y(t 0 ) = y 0 . (11.1.5)<br />
f : I × D ↦→ R d ˆ= right hand side (r.h.s.) (d ∈ N), given in procedural form<br />
✩<br />
Terminology: f = f(y), r.h.s. does not depend on time ➙ ẏ = f(y) is autonomous ODE<br />
For autonomous ODEs:<br />
I = R and r.h.s. y ↦→ f(y) can be regarded as stationary vector<br />
field (velocity field)<br />
if t ↦→ y(t) is solution ⇒ for any τ ∈ R t ↦→ y(t + τ) is solution,<br />
too.<br />
initial time irrelevant: canonical choice t 0 = 0<br />
function v = f(t,y).<br />
I ⊂ R ˆ= (time)interval ↔ “time variable” t<br />
D ⊂ R d ˆ= state space/phase space ↔ “state variable” y (ger.: Zustandsraum)<br />
Ω := I × D ˆ= extended state space (of tupels (t,y))<br />
Note: autonomous ODEs naturally arise when modelling time-invariant systems/phenomena. All<br />
examples above led to autonomous ODEs.<br />
Remark 11.1.5 (Conversion into autonomous ODE).<br />
✫<br />
t 0 ˆ= initial time, y 0 ˆ= initial state ➣ initial conditions<br />
✪<br />
Idea:<br />
include time as an extra d + 1-st component of an extended state vector.<br />
For d > 1 ẏ = f(t,y) can be viewed as a system of ordinary differential equations:<br />
⎛<br />
ẏ = f(y) ⇐⇒ ⎝ y ⎞ ⎛<br />
1<br />
. ⎠ = ⎝ f ⎞<br />
1(t,y 1 ,...,y d )<br />
. ⎠ .<br />
y d f d (t,y 1 , ...,y d )<br />
Example 11.1.4 (Tangent field and solution curves).<br />
Ôº¿¼ ½½º½<br />
This solution component has to grow linearly ⇔ temporal derivative = 1<br />
( ) ( )<br />
(<br />
y(t) z ′<br />
f(zd+1 ,z<br />
z(t) := = : ẏ = f(t,y) ↔ ż = g(z) , g(z) :=<br />
′ )<br />
)<br />
.<br />
t z d+1 1<br />
Ôº¿¾ ½½º½













