

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
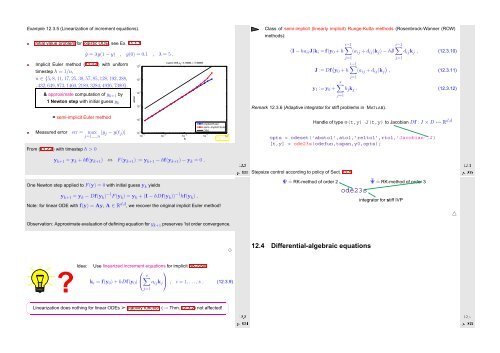
Example 12.3.5 (Linearization of increment equations).<br />
Initial value problem for logistic ODE, see Ex. 11.1.1<br />
Implicit Euler method (11.2.4) with uniform<br />
timestep h = 1/n,<br />
n ∈ {5, 8, 11, 17, 25, 38, 57, 85, 128, 192, 288,<br />
, 432, 649, 973, 1460, 2189, 3284, 4926, 7389}.<br />
& approximate computation of y k+1 by<br />
1 Newton step with initial guess y k<br />
ẏ = λy(1 − y) , y(0) = 0.1 , λ = 5 .<br />
error<br />
10 −1<br />
10 −2<br />
10 −3<br />
Logistic ODE, y 0<br />
= 0.100000, λ = 5.000000<br />
Class of semi-implicit (linearly implicit) Runge-Kutta methods (Rosenbrock-Wanner (ROW)<br />
methods):<br />
∑i−1<br />
∑i−1<br />
(I − ha ii J)k i =f(y 0 + h (a ij + d ij )k j ) − hJ d ij k j , (12.3.10)<br />
j=1<br />
j=1<br />
J := Df ( ∑i−1<br />
)<br />
y 0 + h (a ij + d ij )k j , (12.3.11)<br />
y 1 :=y 0 +<br />
j=1<br />
s∑<br />
b j k j . (12.3.12)<br />
j=1<br />
Remark 12.3.6 (Adaptive integrator for stiff problems in MATLAB).<br />
10 0 h<br />
= semi-implicit Euler method<br />
Measured error err = max<br />
j=1,...,n |y j − y(t j )|<br />
From (11.2.4) with timestep h > 0<br />
10 −4<br />
implicit Euler<br />
semi−implicit Euler<br />
O(h)<br />
10 −5<br />
10 −4 10 −3 10 −2 10 −1 10 0<br />
Fig. 170<br />
y k+1 = y k + hf(y k+1 ) ⇔ F(y k+1 ) := y k+1 − hf(y k+1 ) − y k<br />
Ôº¿¿ ½¾º¿<br />
= 0 .<br />
Handle of type @(t,y) J(t,y) to Jacobian Df : I × D ↦→ R d,d<br />
opts = odeset(’abstol’,atol,’reltol’,rtol,’Jacobian’,J)<br />
[t,y] = ode23s(odefun,tspan,y0,opts);<br />
Stepsize control according to policy of Sect. 11.5:<br />
Ôº¿ ½¾º¿<br />
One Newton step applied to F(y) = 0 with initial guess y k yields<br />
y k+1 = y k − Df(y k ) −1 F(y k ) = y k + (I − hDf(y k )) −1 hf(y k ) .<br />
Note: for linear ODE with f(y) = Ay, A ∈ R d,d , we recover the original implicit Euler method!<br />
Observation: Approximate evaluation of defining equation for y k+1 preserves 1st order convergence.<br />
Ψ ˆ= RK-method of order 2 ˜Ψ ˆ= RK-method of order 3<br />
ode23s<br />
integrator for stiff IVP<br />
△<br />
✸<br />
12.4 Differential-algebraic equations<br />
✗<br />
✖<br />
?Idea:<br />
Use linearized increment equations for implicit RK-SSM<br />
⎛ ⎞<br />
s∑<br />
k i = f(y 0 ) + hDf(y 0 ) ⎝ a ij k j<br />
⎠ , i = 1,...,s . (12.3.9)<br />
Linearization does nothing for linear ODEs ➢ stability function (→ Thm. 12.3.2) not affected!<br />
j=1<br />
✔<br />
✕<br />
Ôº¿ ½¾º¿<br />
Ôº¿ ½¾º













