

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Notice: rank(A) = n ⇒ A H A ∈ R n,n s.p.d. (→ Def. 2.7.1)<br />
A way to avoid the computation of A H A:<br />
Remark 6.1.1 (Conditioning of normal equations).<br />
!<br />
Caution: danger of instability, with SVD A = UΣV H<br />
cond 2 (A H A) = cond 2 (VΣ H U H UΣV H ) = cond 2 (Σ H Σ) = σ2 1<br />
σn<br />
2 = cond 2 (A) 2 .<br />
➣ For fairly ill-conditioned A using the normal equations (6.1.2) to solve the linear least squares<br />
problem (6.1.1) numerically may run the risk of huge amplification of roundoff errors incurred<br />
during the computation of the right hand side A H b: potential instability (→ Def. 2.5.5) of normal<br />
equation approach.<br />
△<br />
Expand normal equations (6.1.2): introduce residual r := Ax − b as new unknown:<br />
( ( )( ) (<br />
A H Ax = A H r −I A r b<br />
b ⇔ B :=<br />
x)<br />
A H = . (6.1.3)<br />
0 x 0)<br />
More general substitution r := α −1 (Ax − b), α > 0 to improve the condition:<br />
( ) ( ) ( ) (<br />
A H Ax = A H r −αI A r b<br />
b ⇔ B α :=<br />
x A H = . (6.1.4)<br />
0 x 0)<br />
For m, n ≫ 1, A sparse, both (6.1.3) and (6.1.4) lead to large sparse linear systems of equations,<br />
amenable to sparse direct elimination techniques, see Sect. 2.6.3<br />
Example 6.1.2 (Instability of normal equations).<br />
Ôº¼ º½<br />
Ôº½½ º½<br />
!<br />
If δ < √ eps ⇒<br />
Caution: loss of information in the computation<br />
of A H A, e.g.<br />
⎛<br />
A = ⎝ 1 1<br />
⎞<br />
( )<br />
δ 0⎠ ⇒ A H 1 + δ 2 1<br />
A =<br />
0 δ<br />
1 1 + δ 2<br />
Sect. 2.4, in particular Rem. 2.4.9.<br />
1 >> A = [1 1 ; . . .<br />
2 sqrt ( eps ) 0 ; . . .<br />
3 0 sqrt ( eps ) ] ;<br />
4 >> rank (A)<br />
5 ans = 2<br />
6 >> rank (A’∗A)<br />
7 ans = 1<br />
1 + δ 2 = 1 in M, i.e. A H A “numeric singular”, though rank(A) = 2, see<br />
✸<br />
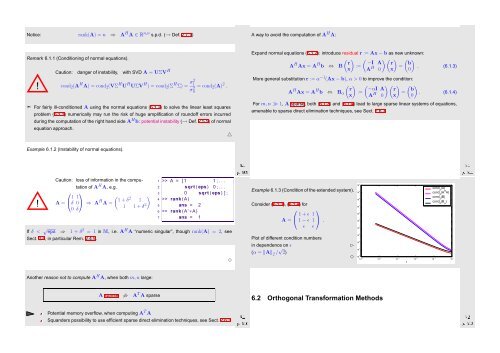
Example 6.1.3 (Condition of the extended system).<br />
Consider (6.1.3), (6.1.4) for<br />
⎛<br />
A = ⎝ 1 + ǫ 1<br />
⎞<br />
1 − ǫ 1 ⎠ .<br />
ǫ ǫ<br />
Plot of different condition numbers<br />
in dependence on ǫ<br />
✄<br />
(α = ‖A‖ 2 / √ 2)<br />
10 9<br />
10 8<br />
10 7<br />
10 6<br />
10 5<br />
10 4<br />
10 3<br />
10 2<br />
10 1<br />
✸<br />
10 0<br />
−5 10<br />
cond 2<br />
(A)<br />
cond 2<br />
(A H A)<br />
cond 2<br />
(B)<br />
cond 2<br />
(B α<br />
)<br />
10 −4 10 −3 10 −2 10 −1 10 0<br />
10 10 ε<br />
Another reason not to compute A H A, when both m, n large:<br />
A sparse ⇏ A T A sparse<br />
Potential memory overflow, when computing A T A<br />
Squanders possibility to use efficient sparse direct elimination techniques, see Sect. 2.6.3<br />
Ôº½¼ º½<br />
6.2 Orthogonal Transformation <strong>Methods</strong><br />
Ôº½¾ º¾













