

Numerical Methods Contents - SAM
Numerical Methods Contents - SAM
Numerical Methods Contents - SAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
y<br />
y 1<br />
y(t)<br />
y 0<br />
t<br />
t 0 t 1 Fig. 133<br />
explicit Euler method (Euler 1768)<br />
✁ First step of explicit Euler method (d = 1):<br />
Slope of tangent = f(t 0 ,y 0 )<br />
y 1 serves as initial value for next step!<br />
(11.2.1) by approximating derivative<br />
dt d by forward difference quotient on a (temporal) mesh M :=<br />
{t 0 , t 1 ,...,t N }:<br />
ẏ = f(t,y) ←→<br />
y k+1 − y k<br />
h k<br />
= f(t k ,y h (t k )) , k = 0,...,N − 1 . (11.2.2)<br />
Difference schemes follow a simple policy for the discretization of differential equations: replace all<br />
derivatives by difference quotients connecting solution values on a set of discrete points (the mesh).<br />
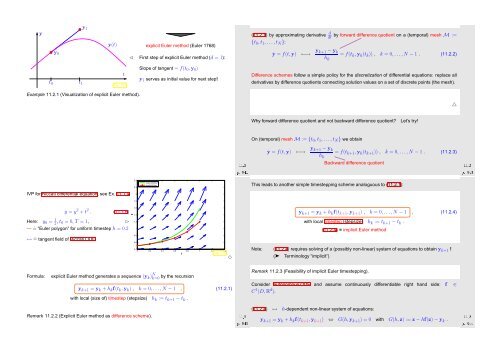
Example 11.2.1 (Visualization of explicit Euler method).<br />
△<br />
Why forward difference quotient and not backward difference quotient?<br />
Let’s try!<br />
Ôº½ ½½º¾<br />
On (temporal) mesh M := {t 0 , t 1 ,...,t N } we obtain<br />
ẏ = f(t,y) ←→<br />
y k+1 − y k<br />
h k<br />
= f(t k+1 ,y h (t k+1 )) , k = 0,...,N − 1 . (11.2.3)<br />
Backward difference quotient<br />
Ôº¿ ½½º¾<br />
2.4<br />
2.2<br />
exact solution<br />
explicit Euler<br />
This leads to another simple timestepping scheme analoguous to (11.2.1):<br />
IVP for Riccati differential equation, see Ex. 11.1.4<br />
2<br />
1.8<br />
ẏ = y 2 + t 2 . (11.1.6)<br />
Here: y 0 = 1 2 , t 0 = 0, T = 1, ✄<br />
— ˆ= “Euler polygon” for uniform timestep h = 0.2<br />
↦→ ˆ= tangent field of Riccati ODE<br />
y<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0 0.2 0.4 0.6 0.8 1 1.2 1.4<br />
t<br />
Fig. 134<br />
✸<br />
y k+1 = y k + h k f(t k+1 ,y k+1 ) , k = 0,...,N − 1 , (11.2.4)<br />
with local timestep (stepsize) h k := t k+1 − t k .<br />
(11.2.4) = implicit Euler method<br />
Note: (11.2.4) requires solving of a (possibly non-linear) system of equations to obtain y k+1 !<br />
(➤ Terminology “implicit”)<br />
Formula:<br />
explicit Euler method generates a sequence (y k ) N k=0 by the recursion<br />
y k+1 = y k + h k f(t k ,y k ) , k = 0,...,N − 1 , (11.2.1)<br />
with local (size of) timestep (stepsize) h k := t k+1 − t k .<br />
Remark 11.2.2 (Explicit Euler method as difference scheme).<br />
Ôº¾ ½½º¾<br />
Remark 11.2.3 (Feasibility of implicit Euler timestepping).<br />
Consider autonomous ODE and assume continuously differentiable right hand side: f ∈<br />
C 1 (D, R d ).<br />
Ôº ½½º¾<br />
y k+1 = y k + h k f(t k+1 ,y k+1 ) ⇔ G(h,y k+1 ) = 0 with G(h,z) := z − hf(z) − y k .<br />
(11.2.4) ↔ h-dependent non-linear system of equations:













