Einführung in die Numerische Mathematik - Lehrstuhl Numerische ...
Einführung in die Numerische Mathematik - Lehrstuhl Numerische ...
Einführung in die Numerische Mathematik - Lehrstuhl Numerische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3 Interpolation und Approximation<br />
3.2 Spl<strong>in</strong>e Interpolation<br />
E<strong>in</strong> wesentlicher Defekt der globalen Interpolation aus dem vorherigen Abschnitt ist, dass<br />
<strong>die</strong> <strong>in</strong>terpolierenden Polynome starke Oszillationen zwischen den Stützstellen mit immer<br />
größeren Werten annehmen. Der Grund ist <strong>die</strong> generische Steifheit, <strong>die</strong> durch <strong>die</strong> implizite<br />
Forderung von C ∞ -Übergängen <strong>in</strong> den Stützstellen gegeben ist. Die Steifheit kann<br />
dadurch reduziert werden, dass <strong>die</strong> globale Funktion als stückweise polynomiale (Teil)-<br />
Funktionen bzgl. der Zerlegung a = x 0 < x 1 < . . . < x n < b zusammengesetzt wird. In<br />
den Stützstellen x i werden dann geeignete Differenzierbarkeitseigenschaften gefordert. Am<br />
häufigsten werden <strong>in</strong> der Literatur sogenannte kubische Spl<strong>in</strong>es verwendet. Allerd<strong>in</strong>gs hat<br />
e<strong>in</strong>e spezielle Klasse, <strong>die</strong> l<strong>in</strong>earen Spl<strong>in</strong>es, e<strong>in</strong>e besondere Bedeutung für <strong>die</strong> numerische<br />
Lösung von Differentialgleichungen mit Hilfe der F<strong>in</strong>ite Elemente Methode [10, 12].<br />
Das wesentliche Ziel <strong>die</strong>ses Abschnitts liegt im Verständnis der stückweisen Approximation.<br />
Dieses Konzept erlaubt <strong>die</strong> gleichmäßige Abschätzung der Konvergenz und verh<strong>in</strong>dert<br />
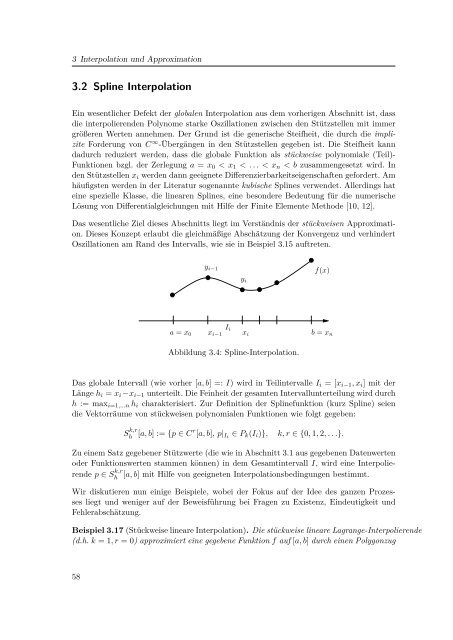
Oszillationen am Rand des Intervalls, wie sie <strong>in</strong> Beispiel 3.15 auftreten.<br />
y i−1<br />
y i<br />
f(x)<br />
I i<br />
a = x 0 x i−1 x i b = x n<br />
Abbildung 3.4: Spl<strong>in</strong>e-Interpolation.<br />
Das globale Intervall (wie vorher [a, b] =: I) wird <strong>in</strong> Teil<strong>in</strong>tervalle I i = [x i−1 , x i ] mit der<br />
Länge h i = x i −x i−1 unterteilt. Die Fe<strong>in</strong>heit der gesamten Intervallunterteilung wird durch<br />
h := max i=1,...n h i charakterisiert. Zur Def<strong>in</strong>ition der Spl<strong>in</strong>efunktion (kurz Spl<strong>in</strong>e) seien<br />
<strong>die</strong> Vektorräume von stückweisen polynomialen Funktionen wie folgt gegeben:<br />
S k,r<br />
h [a, b] := {p ∈ Cr [a, b], p| Ii ∈ P k (I i )}, k, r ∈ {0, 1, 2, . . .}.<br />
Zu e<strong>in</strong>em Satz gegebener Stützwerte (<strong>die</strong> wie <strong>in</strong> Abschnitt 3.1 aus gegebenen Datenwerten<br />
oder Funktionswerten stammen können) <strong>in</strong> dem Gesamt<strong>in</strong>tervall I, wird e<strong>in</strong>e Interpolierende<br />
p ∈ S k,r<br />
h<br />
[a, b] mit Hilfe von geeigneten Interpolationsbed<strong>in</strong>gungen bestimmt.<br />
Wir diskutieren nun e<strong>in</strong>ige Beispiele, wobei der Fokus auf der Idee des ganzen Prozesses<br />
liegt und weniger auf der Beweisführung bei Fragen zu Existenz, E<strong>in</strong>deutigkeit und<br />
Fehlerabschätzung.<br />
Beispiel 3.17 (Stückweise l<strong>in</strong>eare Interpolation). Die stückweise l<strong>in</strong>eare Lagrange-Interpolierende<br />
(d.h. k = 1, r = 0) approximiert e<strong>in</strong>e gegebene Funktion f auf [a, b] durch e<strong>in</strong>en Polygonzug<br />
58