

Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
notas <strong>de</strong> aula – versão 64 - Jerônimo C. Pellegrini<br />
9.5. VARIANTES DE MDPS 139<br />
A equação <strong>de</strong> otimalida<strong>de</strong> para SMDPs é mostrada a seguir. Com ela<br />
po<strong>de</strong>mos usar programação dinâmica na solução <strong>de</strong>stes problemas.<br />
V k (s) = max<br />
a<br />
[<br />
R(s, a) + ∑ s ′ m(s ′ , s, a)V k+1 (s ′ )<br />
Diversos outros métodos para solução <strong>de</strong> MDPs também funcionam<br />
para SMDPs, inclusive a formulação como programa <strong>linear</strong>.<br />
9.5.2 Parâmetros imprecisos<br />
Suponha que alguns dos parâmetros <strong>de</strong> um MDP foram especificados com<br />
imprecisão: sabemos apenas que algumas probabilida<strong>de</strong>s <strong>de</strong> transição e<br />
valores <strong>de</strong> recompensa estão situados em <strong>de</strong>terminados intervalos. Um<br />
MDP especificado <strong>de</strong>sta forma é chamado <strong>de</strong> “MDP com parâmetros imprecisos”<br />
(MDPIP)<br />
9.5.3 Observabilida<strong>de</strong> parcial<br />
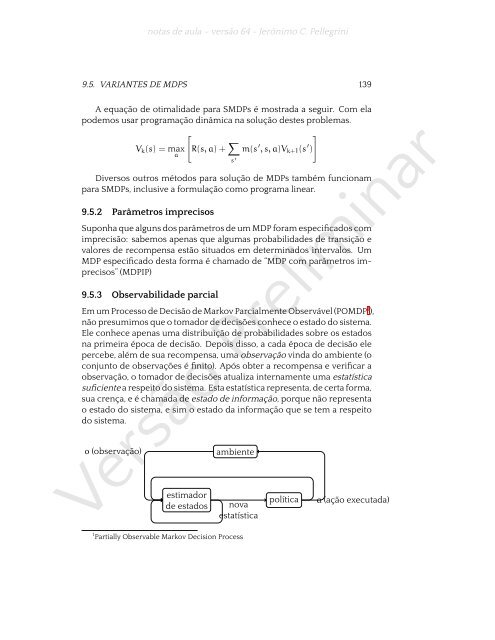
Em um Processo <strong>de</strong> Decisão <strong>de</strong> Markov Parcialmente Observável (POMDP 1 ),<br />
não presumimos que o tomador <strong>de</strong> <strong>de</strong>cisões conhece o estado do sistema.<br />
Ele conhece apenas uma distribuição <strong>de</strong> probabilida<strong>de</strong>s sobre os estados<br />
na primeira época <strong>de</strong> <strong>de</strong>cisão. Depois disso, a cada época <strong>de</strong> <strong>de</strong>cisão ele<br />
percebe, além <strong>de</strong> sua recompensa, uma observação vinda do ambiente (o<br />
conjunto <strong>de</strong> observações é finito). Após obter a recompensa e verificar a<br />
observação, o tomador <strong>de</strong> <strong>de</strong>cisões atualiza internamente uma estatística<br />
suficiente a respeito do sistema. Esta estatística representa, <strong>de</strong> certa forma,<br />
sua crença, e é chamada <strong>de</strong> estado <strong>de</strong> informação, porque não representa<br />
o estado do sistema, e sim o estado da informação que se tem a respeito<br />
do sistema.<br />
o (observação)<br />
ambiente<br />
Versão Preliminar<br />
estimador<br />
<strong>de</strong> estados<br />
nova<br />
estatística<br />
1 Partially Observable Markov Decision Process<br />
política<br />
]<br />
a (ação executada)













