

Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
notas <strong>de</strong> aula – versão 64 - Jerônimo C. Pellegrini<br />
2.2. SOLUÇÕES VIÁVEIS PARA PROGRAMAS LINEARES 25<br />
Exemplo 2.32. Um ponto tem dimensão zero, porque é um conjunto <strong>de</strong><br />
um (0+1) único ponto. Uma reta é um politopo <strong>de</strong> dimensão um, porque<br />
um terceiro ponto sempre po<strong>de</strong> ser <strong>de</strong>scrito como combinação afim <strong>de</strong><br />
dois (1+1) outros na mesma reta. Um triângulo tem dimensão dois, porque<br />
um quarto ponto po<strong>de</strong> ser <strong>de</strong>scrito como combinação afim <strong>de</strong> outros três<br />
(2+1) no mesmo plano. ◭<br />
Teorema 2.33. Um politopo P tem dimensão igual à dimensão <strong>de</strong> aff(P).<br />
Exemplo 2.34. Sabemos que um triângulo tem dimensão dois. De fato, a<br />
envoltória afim do triângulo é R 2 , com dimensão dois.<br />
◭<br />
2.2 Soluções viáveis para programas <strong>linear</strong>es<br />
Teorema 2.35. O conjunto S <strong>de</strong> soluções viáveis para um programa <strong>linear</strong><br />
é fechado, convexo e limitado por baixo.<br />
Demonstração. Pela restrição x ≥ 0, S é limitado por baixo. Além disso,<br />
S é interseção dos semiespaços <strong>de</strong>finidos pelas restrições do problema e<br />
pela restrição <strong>de</strong> não negativida<strong>de</strong>. Como os semiespaços são convexos e<br />
fechados, S também é.<br />
<br />
Teorema 2.36. Seja S o conjunto <strong>de</strong> soluções viáveis para um programa<br />
<strong>linear</strong>. Então, se existe solução ótima para o programa <strong>linear</strong>, existe um<br />
ponto extremo em S com o valor ótimo.<br />
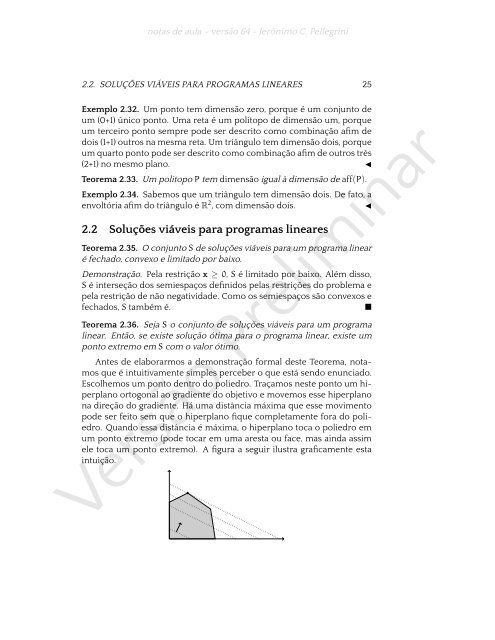
Antes <strong>de</strong> elaborarmos a <strong>de</strong>monstração formal <strong>de</strong>ste Teorema, notamos<br />
que é intuitivamente simples perceber o que está sendo enunciado.<br />
Escolhemos um ponto <strong>de</strong>ntro do poliedro. Traçamos neste ponto um hiperplano<br />
ortogonal ao gradiente do objetivo e movemos esse hiperplano<br />
na direção do gradiente. Há uma distância máxima que esse movimento<br />
po<strong>de</strong> ser feito sem que o hiperplano fique completamente fora do poliedro.<br />
Quando essa distância é máxima, o hiperplano toca o poliedro em<br />
um ponto extremo (po<strong>de</strong> tocar em uma aresta ou face, mas ainda assim<br />
ele toca um ponto extremo). A figura a seguir ilustra graficamente esta<br />
intuição.<br />
Versão Preliminar













