

Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)
Programação Linear (e rudimentos de otimização não-linear)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
notas <strong>de</strong> aula – versão 64 - Jerônimo C. Pellegrini<br />
80 CAPÍTULO 4. DUALIDADE<br />
4.3 Teoremas <strong>de</strong> dualida<strong>de</strong><br />
As soluções ótimas para o primal e o dual tem o mesmo valor, como mostraremos<br />
nos próximos teoremas.<br />
Teorema 4.10 (dualida<strong>de</strong> fraca). Sejam x e y soluções para o primal e o<br />
dual <strong>de</strong> um programa <strong>linear</strong>. Então c T x ≤ b T y.<br />
Demonstração.<br />
c ≤ A T y<br />
c T ≤ y T A<br />
c T x ≤ y T Ax<br />
≤ y T b<br />
= b T y <br />
Corolário 4.11. Se x 0 e y 0 são soluções para o primal e o dual, e c T x 0 =<br />
b T y 0 então ambas são soluções ótimas.<br />
Demonstração. Seja x solução viável para o primal. Então c T x ≤ b T y 0 =<br />
c T x 0 .<br />
<br />
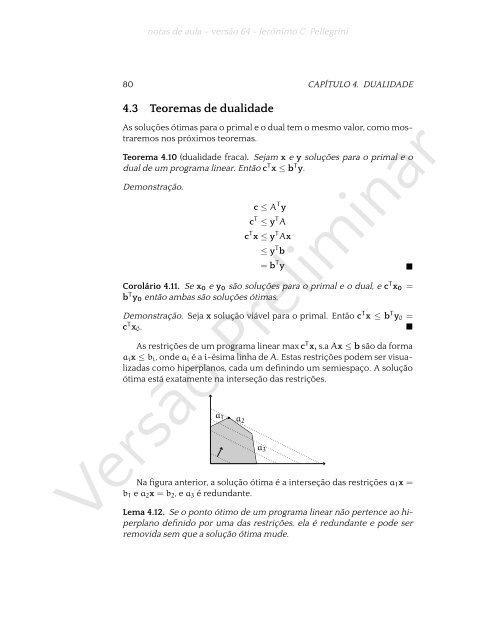
As restrições <strong>de</strong> um programa <strong>linear</strong> max c T x, s.a Ax ≤ b são da forma<br />
a i x ≤ b i , on<strong>de</strong> a i é a i-ésima linha <strong>de</strong> A. Estas restrições po<strong>de</strong>m ser visualizadas<br />
como hiperplanos, cada um <strong>de</strong>finindo um semiespaço. A solução<br />
ótima está exatamente na interseção das restrições.<br />
a 1<br />
a 2<br />
a 3<br />
Na figura anterior, a solução ótima é a interseção das restrições a 1 x =<br />
b 1 e a 2 x = b 2 , e a 3 é redundante.<br />
Versão Preliminar<br />
Lema 4.12. Se o ponto ótimo <strong>de</strong> um programa <strong>linear</strong> não pertence ao hiperplano<br />
<strong>de</strong>finido por uma das restrições, ela é redundante e po<strong>de</strong> ser<br />
removida sem que a solução ótima mu<strong>de</strong>.













