

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
122 Robots <strong>de</strong> exteriores<br />
frente al escaso <strong>de</strong>sarrollo <strong>de</strong> herramientas <strong>de</strong> control y planificación <strong>de</strong><br />
misión. Esta “jerarquía” es un planteamiento razonable, incluso natural,<br />
para el <strong>de</strong>sarrollo <strong>de</strong> un UAV pero comúnmente el diseño <strong>de</strong> las etapas<br />
superiores está condicionado por las capacida<strong>de</strong>s, limitaciones y<br />
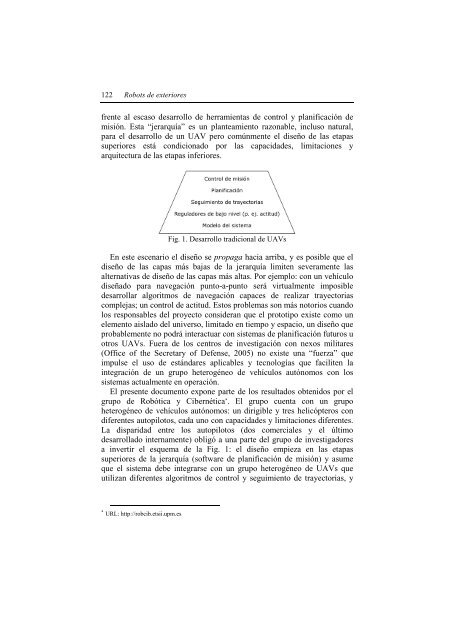
arquitectura <strong>de</strong> las etapas inferiores.<br />
Fig. 1. Desarrollo tradicional <strong>de</strong> UAVs<br />
En este escenario el diseño se propaga hacia arriba, y es posible que el<br />
diseño <strong>de</strong> las capas más bajas <strong>de</strong> la jerarquía limiten severamente las<br />
alternativas <strong>de</strong> diseño <strong>de</strong> las capas más altas. Por ejemplo: con un vehículo<br />
diseñado para navegación punto-a-punto será virtualmente imposible<br />
<strong>de</strong>sarrollar algoritmos <strong>de</strong> navegación capaces <strong>de</strong> realizar trayectorias<br />
complejas; un control <strong>de</strong> actitud. Estos problemas son más notorios cuando<br />
los responsables <strong>de</strong>l proyecto consi<strong>de</strong>ran que el prototipo existe como un<br />
elemento aislado <strong>de</strong>l universo, limitado en tiempo y espacio, un diseño que<br />
probablemente no podrá interactuar con sistemas <strong>de</strong> planificación futuros u<br />
otros UAVs. Fuera <strong>de</strong> los centros <strong>de</strong> investigación con nexos militares<br />
(Office of the Secretary of Defense, 2005) no existe una “fuerza” que<br />
impulse el uso <strong>de</strong> estándares aplicables y tecnologías que faciliten la<br />
integración <strong>de</strong> un grupo heterogéneo <strong>de</strong> vehículos autónomos con los<br />
sistemas actualmente en operación.<br />
El presente documento expone parte <strong>de</strong> los resultados obtenidos por el<br />
grupo <strong>de</strong> <strong>Robótica</strong> y Cibernética * . El grupo cuenta con un grupo<br />
heterogéneo <strong>de</strong> vehículos autónomos: un dirigible y tres helicópteros con<br />
diferentes autopilotos, cada uno con capacida<strong>de</strong>s y limitaciones diferentes.<br />
La disparidad entre los autopilotos (dos comerciales y el último<br />
<strong>de</strong>sarrollado internamente) obligó a una parte <strong>de</strong>l grupo <strong>de</strong> investigadores<br />
a invertir el esquema <strong>de</strong> la Fig. 1: el diseño empieza en las etapas<br />
superiores <strong>de</strong> la jerarquía (software <strong>de</strong> planificación <strong>de</strong> misión) y asume<br />
que el sistema <strong>de</strong>be integrarse con un grupo heterogéneo <strong>de</strong> UAVs que<br />
utilizan diferentes algoritmos <strong>de</strong> control y seguimiento <strong>de</strong> trayectorias, y<br />
*<br />
URL: http://robcib.etsii.upm.es













